模型魚ロボット「PPF-05」
Updated on January 29, 1999 by Koichi Hirata

 PPF-04の運転結果から、尾柄および尾ひれの周波数が高いほど高速で遊泳することが確認されました。PPF-04のようなR/C用サーボモータは正転・逆転を繰り返すので高い周波数での運転にはあまり適していません。一方、一定方向に回転させる回転式モータは、高い周波数での運転に適しています。模型魚ロボットPPF-05は、回転式モータを用いているので高周波数での運転ができます。
PPF-04の運転結果から、尾柄および尾ひれの周波数が高いほど高速で遊泳することが確認されました。PPF-04のようなR/C用サーボモータは正転・逆転を繰り返すので高い周波数での運転にはあまり適していません。一方、一定方向に回転させる回転式モータは、高い周波数での運転に適しています。模型魚ロボットPPF-05は、回転式モータを用いているので高周波数での運転ができます。
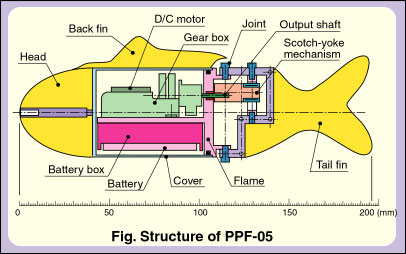 PPF-05の全長196mm、全重量は245gです。小型直流モータ(マブチ130)、ギヤボックス(田宮製、減速比約1/12.5)および電池ボックス(単3形×2本)が、アルミ製のフレームに取り付けられています。アルミ製のカバーとフレームとはOリングで密閉され、電池ボックス端部のON/OFFスイッチはフレームに対してカバーを回転させることで切り替えられます。ギヤボックスからの出力軸は、テフロン製チューブ(内径2mm、外径3mm、長さ4mm)によって簡易的にシールされ、尾柄と尾ひれは1枚のポリプロピレン板(厚さ0.75mm)で作られています。
PPF-05の全長196mm、全重量は245gです。小型直流モータ(マブチ130)、ギヤボックス(田宮製、減速比約1/12.5)および電池ボックス(単3形×2本)が、アルミ製のフレームに取り付けられています。アルミ製のカバーとフレームとはOリングで密閉され、電池ボックス端部のON/OFFスイッチはフレームに対してカバーを回転させることで切り替えられます。ギヤボックスからの出力軸は、テフロン製チューブ(内径2mm、外径3mm、長さ4mm)によって簡易的にシールされ、尾柄と尾ひれは1枚のポリプロピレン板(厚さ0.75mm)で作られています。
 出力軸の回転運動は、スコッチヨーク機構により尾柄および尾ひれの振動に変換されています。尾柄の最大振幅は5.7°(=tan-10.1)一定で、尾柄と尾ひれとの位相差は、尾柄・尾ひれに作用する荷重とポリプロピレン板の弾性に依存します。
出力軸の回転運動は、スコッチヨーク機構により尾柄および尾ひれの振動に変換されています。尾柄の最大振幅は5.7°(=tan-10.1)一定で、尾柄と尾ひれとの位相差は、尾柄・尾ひれに作用する荷重とポリプロピレン板の弾性に依存します。
[ View of Model Fish Robots ]
[ Fish Robot Home Page ]
[ Power and Energy Engineering Division ]
[ Hirata HOME ]
[ NMRI HOME ]
|