Developmental Diary of the PPF-07i
June 9, 2000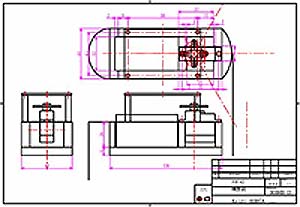 I start the conceptual design. A servomotor and a battery are located in an acrylic case. An electric base for a microcomputer is located above the side of the case.
I start the conceptual design. A servomotor and a battery are located in an acrylic case. An electric base for a microcomputer is located above the side of the case.
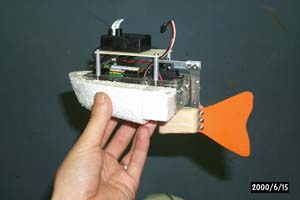
June 15, 2000The approximate shape is completed, shown in the photographs at the right. An R/C receiver is located on the PPF-07i. It was confirmed that it could swim. However, there are several problems.
(1) It has a bad balance in the water.

No good! It is not identical to the first PPF-07i. I must come up with a new fish robot.
June 20, 2000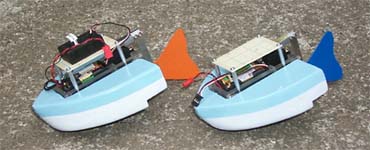 The float hull is finished. Two fish robots are almost completed. One will be used to measured basic performance by me. Another will be developed further by Dr. Sugawara.
The float hull is finished. Two fish robots are almost completed. One will be used to measured basic performance by me. Another will be developed further by Dr. Sugawara.
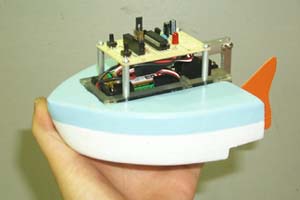
June 21, 2000The microcomputer is installed. The program is almost finished.
[ View of Model Fish Robots ] [ Fish Robot Home Page ] [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |
 Two fish robots were built at the same time. I am about to finish the float hull, and install the microcomputer and sensors.
Two fish robots were built at the same time. I am about to finish the float hull, and install the microcomputer and sensors.