模型魚ロボットPPF-07iの開発日誌
2000/6/9の状況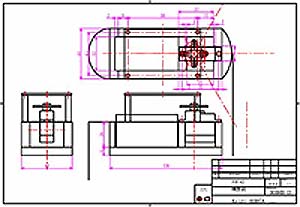 構想を始めました。アクリル製のケースの中にサーボモータと電池を配置し,その上部にマイクロコンピュータの基板を配置します。
構想を始めました。アクリル製のケースの中にサーボモータと電池を配置し,その上部にマイクロコンピュータの基板を配置します。
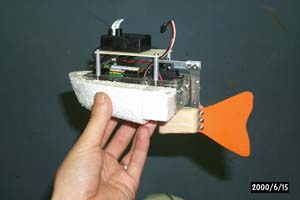
2000/6/15の状況なんとか形になってきました(右写真)。ラジコン受信機をPPF-07iに搭載して,手動で尾ひれを左右に動かし,前進することを確認しました。しかし,いろいろと問題があります。
(1) 重心が高く,浮心が低いため,水中でのバランスが悪い。

2000/6/20の状況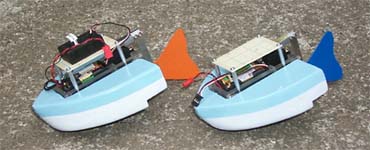 フロート(船体)が完成し,2台が形になってきました。1台はこれからマイクロコンピュータを搭載し,基本性能を測定します。もう1台は電通大で開発が進められます。
フロート(船体)が完成し,2台が形になってきました。1台はこれからマイクロコンピュータを搭載し,基本性能を測定します。もう1台は電通大で開発が進められます。
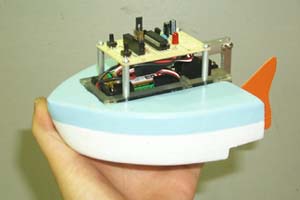
2000/6/21の状況マイクロコンピュータを搭載しました。基本性能を測定するためのプログラムもほぼ完成しました。
[ View of Model Fish Robots ] [ Fish Robot Home Page ] [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |
 2台の魚ロボットを同時に試作しています。今後,フロート(船体)を仕上げて,マイクロコンピュータと何らかのセンサを搭載する予定です。
2台の魚ロボットを同時に試作しています。今後,フロート(船体)を仕上げて,マイクロコンピュータと何らかのセンサを搭載する予定です。