Model Fish Robot, PPF-09
 Design Concept of the PPF-09
Design Concept of the PPF-09We developed an experimental fish robot, UPF-2001 on 2001. It was tried to have 3-D motion including a turning and up-down motion, with two-axes fins. As the result of swiming tests, we confirmed that the fish robot does not have so bad performance of the up-down motion. However, it does not have high performance of the turning motion at all. The model fish robot, PPF-09 has fins for the up-down motion as the same of the UPF-2001. And The PPF-09 has the turning mechanism by the tail motion as the same of the experimental fish robot, PF-300. Their mechanisms will produce a good performance of the 3-D motion.
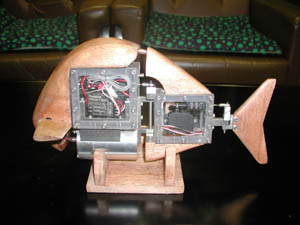
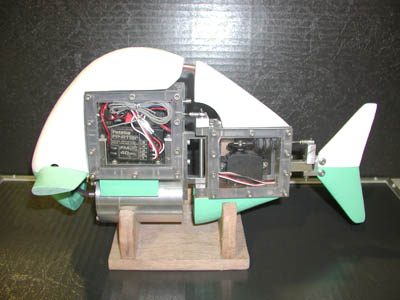
Structure of the PPF-09The model fish robot, PPF-09 has two joints. It swims and turns with vibrations of a tail peduncle and tail fin. Also it can dive in the water with movement of the fins, which are located at the side of a head.
An alminum battery case is hung below the body case. In order to change the battery easily, a few bolts is used for the finstallation, and an O-ring is used between the case and its lid. A servomotor (No. 2) for movement of a joint No.2 located in an acrylic fiber tail peduncle case. A wood tail fin is set to the joint No.2. Several parts of a wood body are screwed to the body cace and the tail peduncle case. In order to balance between buoyancy and gravitation, several weights are set to the belows side of the body case and inside of the head.
Electric wires between the body case and the tail peduncle case, and the body case and the battery case, are covered up by rubber tubes. Thus, the PPF-09 has nearly perfect seal perfomance in the case of an amusement situation.
Motion Control of the PPF-09The model fish robot, PPF-09 is operated with a R/C transmitter (Futaba, 4ch). Wirings of the R/C transmitter are somewhat reorganized. And we can control the PPF-09 like a R/C airplane model with the microcomputer (ATMEL, AT90S8535), which has a function of A/D converter. Belows photographs shows the R/C transmitter. The up-down motion of the left stick changes the frequency of the tail vibrations. The side-to-side motion of the left stick changes the amplitude of the tail vibrations. The up-down motion of the right stick moves the fins of the up-down motion. And the side-to-side motion of the right stick controls the turning of the PPF-09.
Swiming Performance of the PPF-09The model fish robot, PPF-09 is not so good swimmer. The maximum swiming speed is about 0.4 m/s at the straight swiming, and the minimum turning diameter is about 400 mm, though we have not measured them accurately. In the case of the diving, the PPF-09 dives narrowly after a runup of about 1 m. However it is too dull, and it does not have quick motion like a real fish. If the PPF-09 is well balanced the weight and the center of gravity, it may have high diving performance.


 Future of the PPF-09
Future of the PPF-09The model fish robot, PPF-09 does not aim at a practical used underwater robot. Of course, the PPF-09 cannot work effectively in the sea. However I think that the PPF-09 is highly completed as a model fish robot. One of the applications of the PPF-09 is a teaching material for overall technical fields including of fundamental dynamics, machinery, metal working, mechanical components and electronics. Another is an exclusive toy.
  Developmental Diary of the PPF-09 CAD Data of the PPF-09 R/C Controller of the PPF-09 (Underconstructing) Tips for Making of the PPF-09 (Underconstructing) Movies of the PPF-09 [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |
 On the other hand, from the developments of many fish robots, we have confirmed seberal problems like a troublesome battery change, a difficult operation and a defective waterproofed body. The PPF-09 is an amusement fish robot, which has a simple handling, and it will give us great pleasure.
On the other hand, from the developments of many fish robots, we have confirmed seberal problems like a troublesome battery change, a difficult operation and a defective waterproofed body. The PPF-09 is an amusement fish robot, which has a simple handling, and it will give us great pleasure.
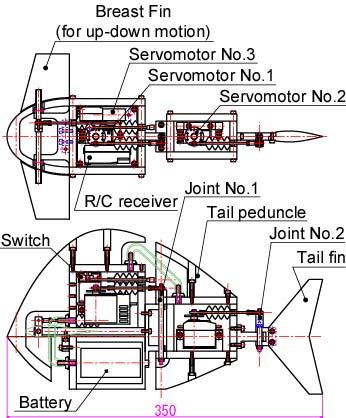 A servomotor (No. 1) for movement of a joint No.1, a servomotor (No. 3) for the up-down motion, a R/C (radio control) receiver and an electric switch are located in an acrylic fiber body case. Rods of the servomotors and the switch are waterpriifed by rubber boots.
A servomotor (No. 1) for movement of a joint No.1, a servomotor (No. 3) for the up-down motion, a R/C (radio control) receiver and an electric switch are located in an acrylic fiber body case. Rods of the servomotors and the switch are waterpriifed by rubber boots.