模型魚ロボット「PPF-09」
 PPF-09の設計コンセプト
PPF-09の設計コンセプト2001年に開発した実験用魚ロボットUPF-2001では,3次元運動(旋回運動+上下運動)を試みました。その結果,そこそこの上下運動は可能であることが確認できましたが,フィンによる旋回はほとんどできませんでした。模型魚ロボットPPF-09は,UPF-2001と同様の上下運動の機構と実験用魚ロボットPF-300の尾ひれを偏らせる運動による旋回機構を組み合わせることで,高度な3次元運動を目指しました。
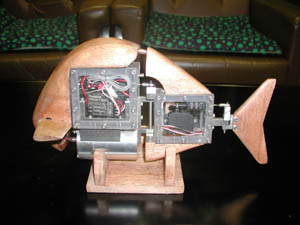
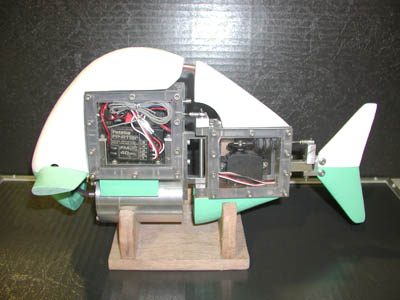
PPF-09の構造模型魚ロボットPPF-09は,2つの関節を持ち,尾柄と尾ひれを左右に振動させながら,直進・旋回を行います。さらに頭部に取り付けたフィンを動かすことにより,深度方向の運動を行うことができます。
PPF-09の操縦模型魚ロボットPPF-09は,市販のラジコン装置(双葉電子製,4chプロポ)で操縦できます。R/C送信機を若干改造し,A/Dコンバータ機能を持つマイクロコンピュータ(ATMEL製,AT90S8535)を取り付けることで,ラジコン飛行機のような3次元運動ができます。すなわち,下写真に示すように,左のスティックを上下方向に動かすと尾ひれの周波数,左右方向に動かすと尾ひれの振幅が変化します。右のスティックを上下方向に動かすと上下運動用フィンが動き,左右方向に尾ひれの偏りが変化し,旋回します。
PPF-09の遊泳性能模型魚ロボットPPF-09は,それほど高い遊泳性能ではありません。しっかりと測定したわけではありませんが,最高速度は0.4 m/s程度(直進時)です。最小旋回直径は400 mm程度で,自宅の風呂で何とかぶつからずに旋回できる程度です。上下運動については,1 m程度の助走をつけ,そこそこの速度になると,かろうじて潜ることができます。しかし,深度方向の運動はかなり鈍く,実際の魚のようなクイックな潜水には全く至りません。重量や重心位置を調整することで高性能な上下運動が実現できるのかもしれません。


 PPF-09の展望
PPF-09の展望模型魚ロボットPPF-09は,実用的な海中ロボットを目指したものではなく,実際の水中作業を行うようなことはできません。しかし,模型魚ロボットとしての完成度はかなり高いものと考えています。PPF-09の一つの用途としては,力学や機構学,機械加工,機械要素,さらに電子制御(メカトロニクス)などを含めた総合的な教材として使用できるのではないかと考えています。また,デザイン性・操作性をより高めることで,高級玩具としても利用できるのではないでしょうか。
  模型魚ロボットPPF-09の開発日誌 模型魚ロボットPPF-09のCADデータ 模型魚ロボットPPF-09のR/Cコントローラ(準備中) 模型魚ロボットPPF-09の製作(準備中) 模型魚ロボットPPF-09のムービー [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |
 一方,今までに開発してきた魚ロボットから,バッテリ交換が面倒なこと,操縦が難しいこと,防水がしっかりとしていないことなど,様々な不具合が確認されています。模型魚ロボットPPF-09は,「扱いやすさ」や「楽しさ」を高めた,アミューズメント性が高い魚ロボットです。
一方,今までに開発してきた魚ロボットから,バッテリ交換が面倒なこと,操縦が難しいこと,防水がしっかりとしていないことなど,様々な不具合が確認されています。模型魚ロボットPPF-09は,「扱いやすさ」や「楽しさ」を高めた,アミューズメント性が高い魚ロボットです。
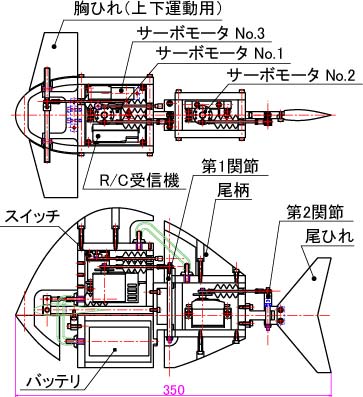 アクリル製の四角い胴体ケースには,第1関節を動かすためのサーボモータ(No.1),上下運動用のフィンを動かすためのサーボモータ(No.3),ラジコン用(R/C)受信機,電源のスイッチが内蔵されています。サーボモータおよびスイッチに取り付けたロッドはゴム製の防水ブーツで水密されています。
アクリル製の四角い胴体ケースには,第1関節を動かすためのサーボモータ(No.1),上下運動用のフィンを動かすためのサーボモータ(No.3),ラジコン用(R/C)受信機,電源のスイッチが内蔵されています。サーボモータおよびスイッチに取り付けたロッドはゴム製の防水ブーツで水密されています。