| 模型魚ロボット by 平成14年度研修生 2003/1/8 平田宏一 
 魚形模型ボート
魚形模型ボート
 上下運動を確認するための模型潜水船
上下運動を確認するための模型潜水船
 デファレンシャルギヤを付けた模型車いす(おまけ)
デファレンシャルギヤを付けた模型車いす(おまけ)

[ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
|
|
| Contact khirata@nmri.go.jp |
| 模型魚ロボット by 平成14年度研修生 2003/1/8 平田宏一
魚形模型ボート
上下運動を確認するための模型潜水船
デファレンシャルギヤを付けた模型車いす(おまけ)
[ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
|
|
| Contact khirata@nmri.go.jp |
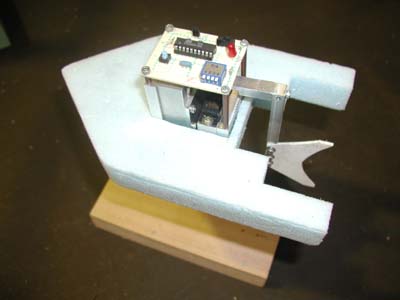 右の写真は,青木君(東京電機大学工学部機械工学科4年,平成14年度研修生)により製作された模型ボートです。機械設計・試作・加工の練習,さらにマイコン回路の勉強のために作りました。この模型ボートは,1個のラジコン用サーボモータを使用し,尾ひれを左右に往復させて進みます。
右の写真は,青木君(東京電機大学工学部機械工学科4年,平成14年度研修生)により製作された模型ボートです。機械設計・試作・加工の練習,さらにマイコン回路の勉強のために作りました。この模型ボートは,1個のラジコン用サーボモータを使用し,尾ひれを左右に往復させて進みます。 右の写真は,桜井君(法政大学工学部機械工学科4年,平成14年度研修生)により製作された模型潜水船です。もの作りの基礎を学ぶため,そして魚ロボットの上下運動用フィンの効果を調べるために作った試作モデルです。結果として,上下運動するためのフィンの効果はほとんど確認できず,フィンを用いて上下運動させるには,フィンの効果が現れる速度にしなくてはならないことがわかりました(桜井談)。
右の写真は,桜井君(法政大学工学部機械工学科4年,平成14年度研修生)により製作された模型潜水船です。もの作りの基礎を学ぶため,そして魚ロボットの上下運動用フィンの効果を調べるために作った試作モデルです。結果として,上下運動するためのフィンの効果はほとんど確認できず,フィンを用いて上下運動させるには,フィンの効果が現れる速度にしなくてはならないことがわかりました(桜井談)。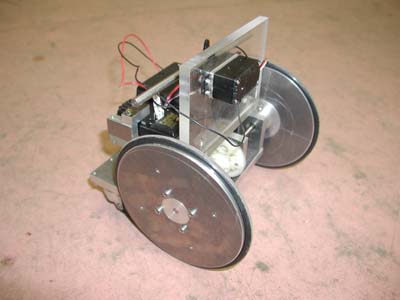 魚ロボットとは全く関係ありませんが,右の写真は,高田君(法政大学工学部機械工学科4年,平成14年度研修生)により製作された模型車いすです。機械加工の練習,さらに卒業研究で設計・試作する車いす走行補助装置のイメージをつかむために作りました。詳しくは,
魚ロボットとは全く関係ありませんが,右の写真は,高田君(法政大学工学部機械工学科4年,平成14年度研修生)により製作された模型車いすです。機械加工の練習,さらに卒業研究で設計・試作する車いす走行補助装置のイメージをつかむために作りました。詳しくは,