| 模型魚ロボット by 平成15年度研修生 2003/9/29 平田宏一 
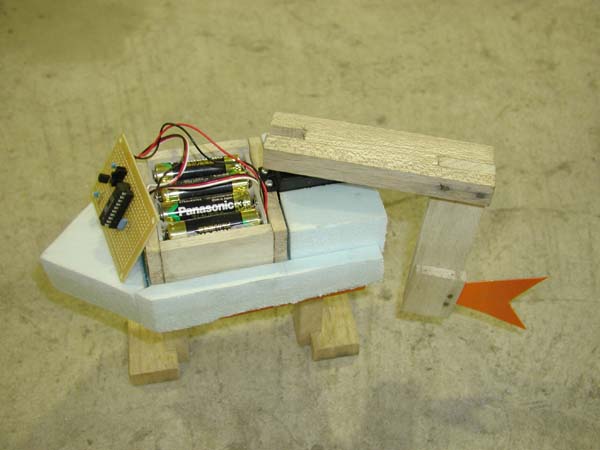
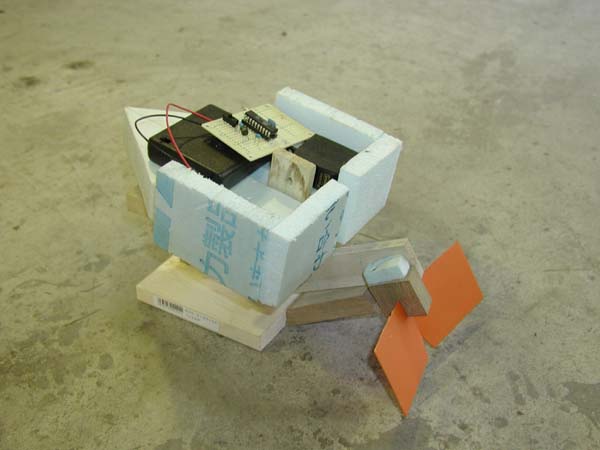
2003年4月,工学院大学研修生の菱沼君が,マンタ形(?)の簡単魚ロボットを製作しました。2つのひれを上下に動かして泳ぎます。
[ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
|
|
| Contact khirata@nmri.go.jp |
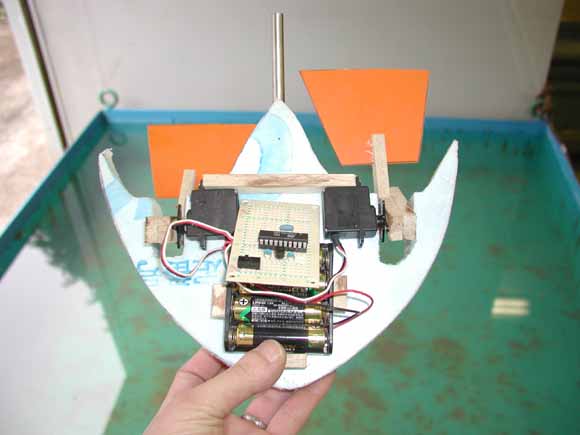
| 模型魚ロボット by 平成15年度研修生 2003/9/29 平田宏一
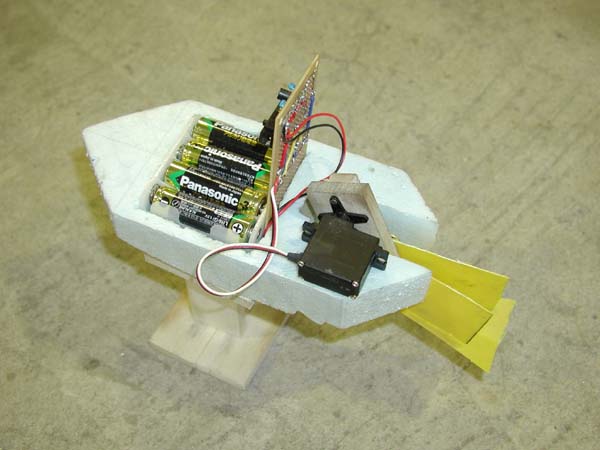
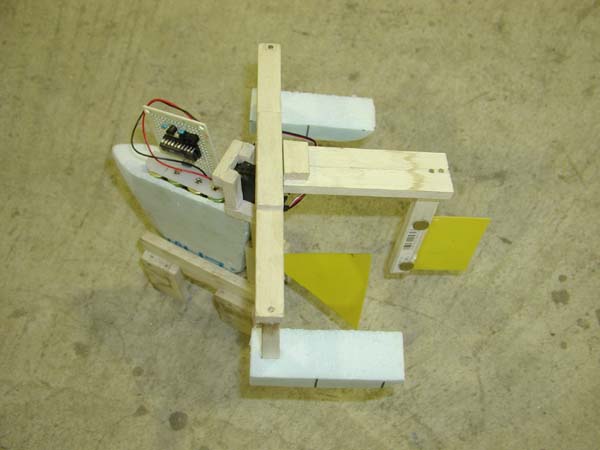
2003年4月,工学院大学研修生の菱沼君が,マンタ形(?)の簡単魚ロボットを製作しました。2つのひれを上下に動かして泳ぎます。
[ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
|
|
| Contact khirata@nmri.go.jp |

{kind=link}