
偊偄峲梡嫑儘儃僢僩乽PF-600D乿
1999/11/9峏怴
幚尡丗杚栰丆戧杮丆塅揷
PF-600D惢嶌丗暯揷

偊偄峲梡嫑儘儃僢僩乽PF-600D乿偵偮偄偰
丂偊偄峲梡嫑儘儃僢僩乽Prototype Fish Robot, PF-600D乿偼丆PF-600偺掞峈傪應掕偡傞偨傔偵帋嶌偟傑偟偨丅嬱摦尮傗娭愡偼庢傝晅偗傜傟偰偄傑偣傫偑丆奜宍偼悇恑惈擻幚尡梡嫑儘儃僢僩PF-600偲摨偠偱偡丅
 PF-600D偺恾柺偼偙偪傜
PF-600D偺恾柺偼偙偪傜
拞悈憛偱偺偊偄峲幚尡
丂壓偺幨恀偼丆拞悈憛乮200m乯偱偺幚尡偺條巕偱偡乮1999/11/1乣5乯丅偊偄峲幚尡偺寢壥偼丆嫑儘儃僢僩偺摦椡尮偺弌椡儗儀儖傪専摙偡傞摍偺愝寁巟墖偵峷專偟丆偝傜偵嫑儘儃僢僩偺摍壙揑側悇恑岠棪傪昡壙偡傞偨傔偵傕昁梫偵側傝傑偡丅傑偨丆
- 怺搙偲掞峈偺娭學傪媮傔傞偙偲偱丆崱屻偺幚尡媦傃嫑儘儃僢僩奐敪偺婎慴僨乕僞偲偡傞丅
- 儗僀僲儖僘悢偲掞峈學悢偲偺娭學傪惍棟偟丆婛懚偺奀拞儘儃僢僩偺掞峈偲斾妑偡傞偙偲偱丆嫑偺宍忬偺桳棙惈乮傑偨偼晄棙惈乯傪峫嶡偡傞丅
- 杮幚尡偵傛傝丆掞峈學悢乮Cd抣乯傪媮傔傞偙偲偱丆嫑儘儃僢僩愝寁帪偺掞峈寁嶼傪梕堈偵偡傞丅
摍偵傕峷專偱偒傞偲峫偊傜傟傑偡丅

偝傜偵懡偔偺幨恀傪尒偨偄曽偼偙偪傜

幚尡曽朄偲幚尡忦審
丂塃幨恀偺傛偆偵丆PF-600D偵僗僩儔僢僩傪庢傝晅偗丆怺搙d(m)偲懍搙Vm(m/s)傪曄壔偝偣偰幚尡傪峴偄傑偟偨丅怺搙d(m)偲PF-600D摲晹偺奜宎D(=0.148m)偲偺斾d/D偼0.5丆1.0丆2.0丆3.0偺4忦審丆偦偟偰懍搙Vm(m/s)偼0.2m/s偐傜4.2m/s偺斖埻偱應掕偟偰偄傑偡丅
丂幚尡偺嵞尰惈摍傪妋擣偡傞偨傔丆埲忋偺忦審偱2夞偺幚尡傪峴偄傑偟偨丅
幚尡寢壥
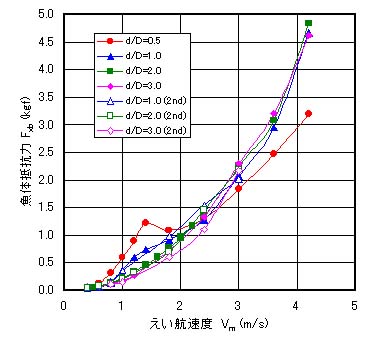
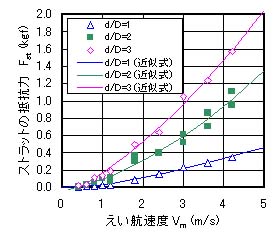
丂塃偺恾偼懍搙Vm(m/s)偵懳偡傞嫑懱偺掞峈椡Fxb(kgf)偺幚尡寢壥偱偡丅嫑懱偺掞峈椡Fxb偼丆幚尡偱摼傜傟偨慡掞峈椡Fx(kgf)偐傜僗僩儔僢僩扨懱偺掞峈椡Fst(kgf)傪嵎偟堷偄偰媮傔偰偄傑偡丅傑偨丆恾拞偺d偼怺搙(m)丆D偼嫑儘儃僢僩偺奜宎(=0.148m)偱偡丅偙傟傛傝丆怺搙偑d/D=1偐傜3偺斖埻偱偼丆掞峈椡偺嵎偼偐側傝彫偝偄偙偲偑傢偐傝傑偡丅d/D=0.5偵偍偄偰丆崅懍帪偵掞峈椡偑掅壓偟偰偄傞偺偼丆嫑儘儃僢僩偺昞柺偺堦晹偑悈柺偐傜業弌偟偰偄偨偨傔偱偁傞偲峫偊傜傟傑偡丅傑偨丆d/D=0.5偲d/D=1偵偍偄偰丆掅懍帪偵掞峈椡偑憹戝偟偰偄傞偺偼丆嫑儘儃僢僩偑嫟怳偟偨偨傔偱偁傞偲峫偊傜傟傑偡丅
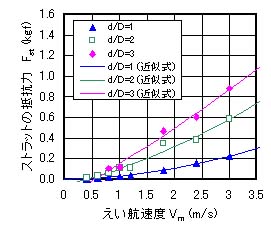
 丂塃偺恾偼丆嫑儘儃僢僩傪庢傝奜偟偨忬懺偱應掕偟偨懍搙Vm(m/s)偵懳偡傞僗僩儔僢僩偺掞峈椡Fst(kgf)偺幚尡寢壥偱偡乮嵍丗1夞栚丆塃丗2夞栚乯丅恾拞偺幚慄偼嵟彫擇忔朄偵傛偭偰媮傔偨擇師懡崁幃傪昞偟偰偄傑偡丅偙偺僨乕僞偼丆忋婰偺幚尡偱摼傜傟偨慡掞峈椡Fx偐傜嫑懱偺掞峈椡Fxb傪媮傔傞偨傔偵巊梡偟傑偟偨丅
丂塃偺恾偼丆嫑儘儃僢僩傪庢傝奜偟偨忬懺偱應掕偟偨懍搙Vm(m/s)偵懳偡傞僗僩儔僢僩偺掞峈椡Fst(kgf)偺幚尡寢壥偱偡乮嵍丗1夞栚丆塃丗2夞栚乯丅恾拞偺幚慄偼嵟彫擇忔朄偵傛偭偰媮傔偨擇師懡崁幃傪昞偟偰偄傑偡丅偙偺僨乕僞偼丆忋婰偺幚尡偱摼傜傟偨慡掞峈椡Fx偐傜嫑懱偺掞峈椡Fxb傪媮傔傞偨傔偵巊梡偟傑偟偨丅
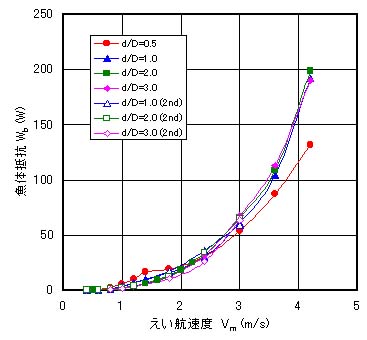 丂塃偺恾偼懍搙Vm(m/s)偵懳偡傞嫑儘儃僢僩偺掞峈Wb(W)[=Fxb(N)亊Vm(m/s)]傪帵偟偰偄傑偡丅偙偺幚尡寢壥偼嫑儘儃僢僩偺摦椡尮偺弌椡儗儀儖傪専摙偡傞嵺偵桳岠側僨乕僞偲側傝傑偡丅
丂塃偺恾偼懍搙Vm(m/s)偵懳偡傞嫑儘儃僢僩偺掞峈Wb(W)[=Fxb(N)亊Vm(m/s)]傪帵偟偰偄傑偡丅偙偺幚尡寢壥偼嫑儘儃僢僩偺摦椡尮偺弌椡儗儀儖傪専摙偡傞嵺偵桳岠側僨乕僞偲側傝傑偡丅
丂椺偊偽丆PF-600傪懍搙3.5m/s偱塲偑偣傞応崌丆彮側偔偲傕弌椡100W埲忋偺摦椡尮偑昁梫偲側傞偙偲偑傢偐傝傑偡丅嫑儘儃僢僩偼旜晹傪摦偐偟側偑傜塲偖偨傔丆尩枾偵偼杮幚尡偱媮傔偨掞峈偼曄壔偡傞偲峫偊傜傟傑偡偑丆戝傑偐側弌椡儗儀儖偺専摙偵偼廫暘側僨乕僞偱偁傞偲峫偊偰偄傑偡丅
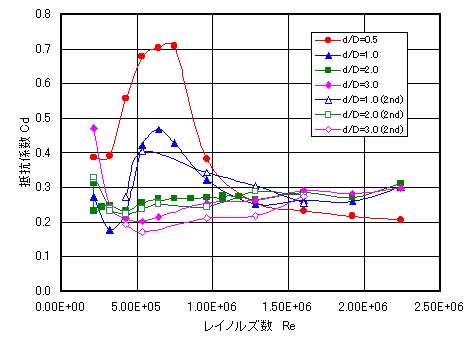 丂塃偺恾偼儗僀僲儖僘悢Re偵懳偡傞嫑儘儃僢僩偺掞峈學悢Cd傪帵偟偰偄傑偡丅Re媦傃Cd偼師幃偱媮傔偰偄傑偡丅
丂塃偺恾偼儗僀僲儖僘悢Re偵懳偡傞嫑儘儃僢僩偺掞峈學悢Cd傪帵偟偰偄傑偡丅Re媦傃Cd偼師幃偱媮傔偰偄傑偡丅
Re=VmL/兯
Cd=Fxb/(1/2兿Vm2S)
偙偙偱丆L偼嫑儘儃僢僩偺慡挿乮=0.6m乯丆兯偼悈偺摦擲惈學悢乮=1.12亊10-6m2/s乯丆兿偼悈偺枾搙乮=1000kg/m3乯丆S偼嫑儘儃僢僩偺搳塭柺愊乮=兾D2/4(m2)乯偱偡丅
丂偙傟傛傝丆d/D=0.5偲d/D=1偵偍偗傞嫟怳帪偺僨乕僞傪彍偗偽丆儗僀僲儖僘悢Re偑5亊105偐傜2亊106偺斖埻偱丆掞峈學悢Cd偼0.2乣0.3掱搙偲側偭偰偄傞偙偲偑傢偐傝傑偡丅
丂偨偩偟丆幚嵺偺揟宆揑側僐僀偺応崌丆L=0.28m丆Vm=0.98m/s偱偁傝(1)丆儗僀僲儖僘悢Re偼2.5亊105掱搙丆揟宆揑側僀儖僇偺応崌L=2.3m丆Vm=9.43m/s偱偁傝(1)丆儗僀僲儖僘悢Re偼2.2亊107掱搙偲側傞偨傔丆杮幚尡偺斖埻偑廫暘偱偁傞偲偼尵偊傑偣傫丅
暥專
(1) 塱堜丂泬丗僀儖僇偵妛傇棳懱椡妛丆僆乕儉幮丆p.113-114(1999)丏
[Other Information and Link]
Return to Fish Robot Home Page
Koichi Hirata
e-mail: khirata@nmri.go.jp (Office)
e-mail: khirata@gem.bekkoame.ne.jp (Home)