「流れの可視化」お試しバージョン
1999/11/19更新 平田,瀧本,牧野,藁科
魚ロボットにおける流れの可視化
魚ロボットの「流れの可視化」は,
- 魚ロボットの推進機構の究明すること,
- 渦の発生(方向と強さ)を見ることによって,最適運動パターンを模索すること,
- 魚ロボットを旋回させる場合の流れと回転モーメントの関係を調べること,
等に貢献できると考えられます。
流れの可視化の予備試験
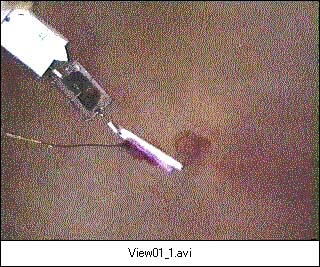
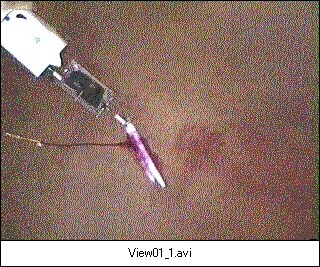
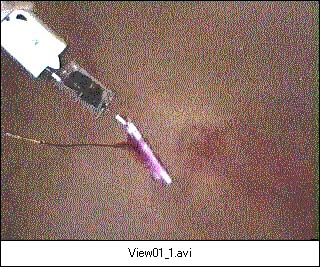
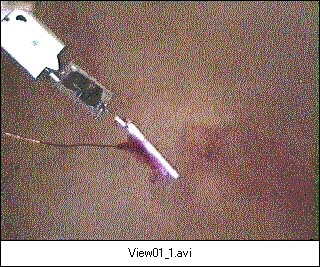
旋回性能実験用魚ロボットPF-300を使って,「流れの可視化」の予備試験を行いました(99/11/19)。PF-300が前進しないように手で固定し,周波数2Hzで尾柄・尾びれを振幅させた状態で,尾びれの前方付近から染料を流しました。
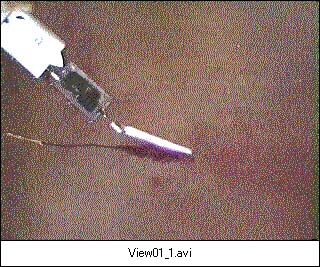
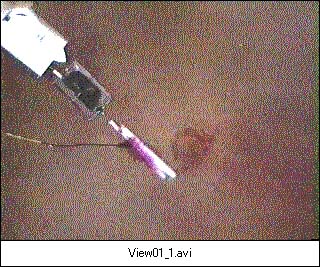
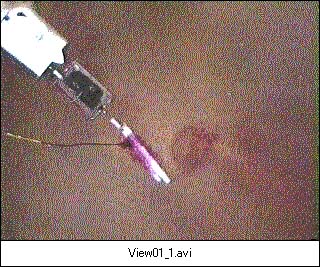
下の写真は,尾びれの振幅の1周期分を,1/30秒間隔で撮影しています(15コマ)。これより,尾びれが最右端を過ぎた付近(No.7~8)から,尾びれの先端に反時計回りの渦が発生し始め,徐々に成長していく過程(No.9~11)が確認できました。その後,渦は尾びれから離れて,拡散し消えていきます(No.12~15)。
簡単なまとめ
今回の予備試験によって,
- 魚ロボットが前進していない状態であれば,簡単な装置を用いて,ある程度の「流れの可視化」ができること,
- 染料を流す位置が尾びれ前方のかなり近い位置でないと,染料が尾びれに到達する前に拡散してしまうため,可視化ができないこと,
- 魚ロボットを前進させている場合,染料の拡散やビデオカメラの設置方法等に問題があり可視化が難しいこと,
等がわかりました。これらの結果を踏まえて,回流水槽による可視化実験やPIV (Particle Image Velocimetry)による可視化実験の研究を進めていきたいと考えています。
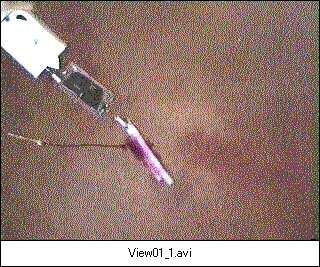 No.1
No.1
0秒経過
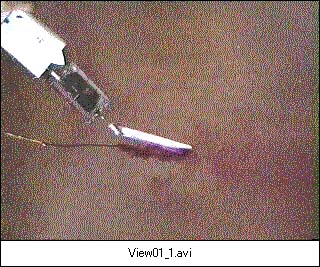
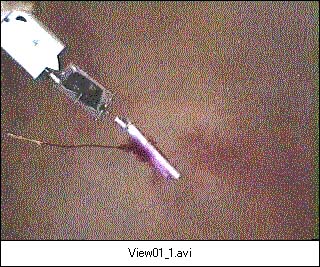 No.2
No.2
1/30秒経過
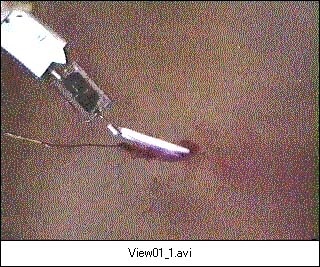
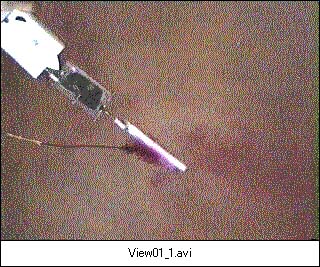 No.3
No.3
2/30秒経過
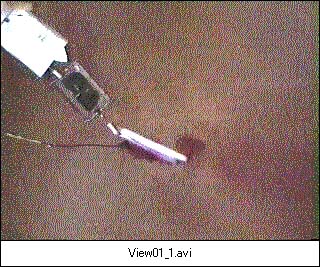
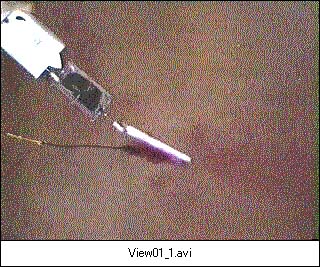 No.4
No.4
3/30秒経過
 No.5
No.5
4/30秒経過
 No.6
No.6
5/30秒経過
 No.7
No.7
6/30秒経過
 No.8
No.8
7/30秒経過
 No.9
No.9
8/30秒経過
 No.10
No.10
9/30秒経過
 No.11
No.11
10/30秒経過
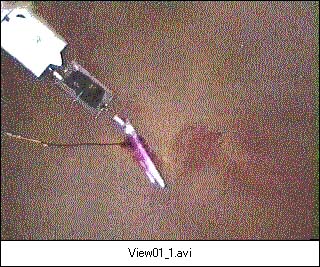 No.12
No.12
11/30秒経過
 No.13
No.13
12/30秒経過
 No.14
No.14
13/30秒経過
 No.15
No.15
14/30秒経過
動画(Quick Time,981 kB)
[Other Information and Link]
Return to Fish Robot Home Page
Koichi Hirata
e-mail: khirata@nmri.go.jp (Office)
e-mail: khirata@gem.bekkoame.ne.jp (Home)