|
|
|
魚ロボット用スターリングエンジン'S-FPSE 2000' 2001/4/25最終更新 平田宏一 
実験的にセミフリーピストン形スターリングエンジンの特性や魚ロボットへの適用性をしらべるため,模型レベルの実験用エンジンを魚の推進方法を利用した模型ボートに搭載することとしました。


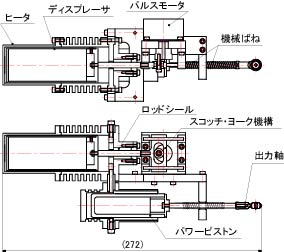
 エンジンの構造 エンジンの構造右図に試作したエンジンの構造を示します。基本構造は以前に開発した実験用エンジンと同じです。ヒータやディスプレーサは従来の模型エンジンに用いられているような簡単な構造であり,再生器は取り付けられていません。ディスプレーサの駆動には,周波数の設定が容易なパルスモータを使用しました。パルスモータの周波数(回転数)はマイクロコンピュータにより0.5 Hzから4.0 Hzまで0.5 Hz刻みで任意に設定できます。ディスプレーサの駆動機構にはスコッチ・ヨーク機構を採用し,小型化を試みています。ディスプレーサのロッドシールには市販の滑り軸受を使用しました。パワーピストンには50 mlの注射器を流用し,ロッドの一端には2本の機械ばねを取り付けました。
 模型ボートの構造
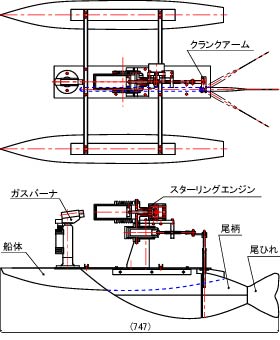
模型ボートの構造右図に試作した模型ボートの構造を示します。模型ボートは,船体の安定性や推進装置(尾ひれ)の配置を考慮し,双胴船としました。エンジンは模型ボートのほぼ中央に配置され,その前方の小型ガスバーナによって,ヒータを直接加熱します。両船体の中央後部には,魚を模擬した推進装置を取り付けています。推進装置とパワーピストンのロッドとはクランク機構を介してつなげらています。尾柄の材質には硬質の木材を使用し,尾ひれには軟質のポリプロピレン板(厚さ0.75 mm)を使用しました。エンジンを含めた模型ボートの総重量は約2 kgです。
 実験結果
実験結果
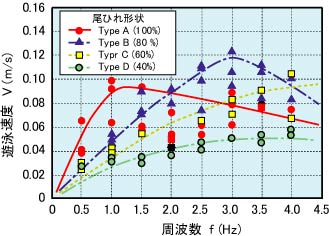
以下の実験では,大きさが異なる4種類の尾ひれを使用しました。4種類の尾ひれは,相似形状をしており,Type B,Type C及びType Dの尾ひれはそれぞれType Aの尾ひれの80 %,60 %及び40 %の寸法としています。 S-FPSE 2000開発日誌 |
|
|
| Contact khirata@nmri.go.jp |