| Development of a Hand-operated Wheelchair Model November 2001, Koichi Hirata and Yasuhiro Makita 
 Outline
Outline
It has been clarified that the operation of a hand-operated wheelchair becomes too hard on a waving ship. It is difficult to keep safe driving. In the case of the experimental study with a real-sized wheelchair, a large-scale waving equipment or several experiments on a ship is required. Also, the driving characteristics of the wheelchair are changed strongly by the skillful of a driver. Thus, it is difficult to measure the characteristics in detail using the real-sized wheelchair. In order to measure the driving characteristics of the wheelchair without the large-scaled equipment, we develop a model wheelchair on a scale of 1 to 3. It is driven by two D/C motors, and has simple brake mechanisms.
Operation of a Hand-operated Wheelchair
The characteristics of the wheelchair are that; the driving force gives intermittently, inertia running situations happens intermittently, it turns diffrence of the driving force without a steering mechanism like a automobile.
As the wheelchair has the front wheels that turn freely, when it runs across on a slope, it is affected the moment force to down direction. Namely, it is need the suitable driving and braking operation for keeping the straight course on the slope or a waving ship.
Development of the Model Wheelchair

 Running Test on a Slope
Running Test on a Slope
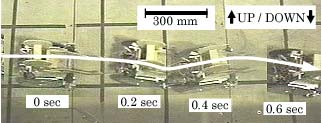
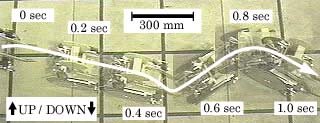
We tried to run the model wheelchair across on a slope, angle of 3, 5 and 7 degrees. We controlled the brake mechanism with a hand-operated R/C system for keeping a straight course. Belows photographs show one of the good results. When the wheelchair ran on a small angle slope, it could keep the constant speed and the straight course well. On the other hand, when it ran on a big angle slope, speed change became strong, and it could not keep the straight course at all. These are the same of the characteristics and operating feeling of a real wheelchair. 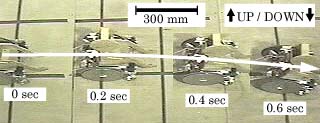 (a) Slope angle, 3 degrees
More Information
|
|
[ Barrier-free HOME ] [ NMRI HOME ] |
|
|
| Contact: khirata@nmri.go.jp |
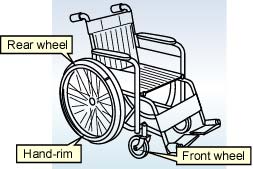 A hand-operated wheelchair runs with intermitted driving force to hand-rims. The wheelchair stops with friction force to the hand-rims or tires. The wheelchair turns with different force to wheels, or with driving force to a wheel and brake force to another wheel.
A hand-operated wheelchair runs with intermitted driving force to hand-rims. The wheelchair stops with friction force to the hand-rims or tires. The wheelchair turns with different force to wheels, or with driving force to a wheel and brake force to another wheel.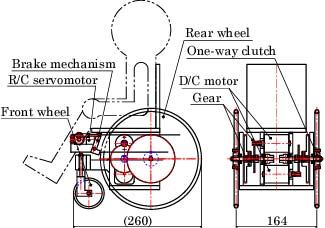 We develop a model wheelchair as shown in the figure to the right. It has a scale of 1 to 3, and 204 mm of a rear wheel diameter. The rear wheels are driven by D/C motors. The revolution of the motor is reduced to about 1/60 by several gears. An one-way-clutch is attached between each rear wheel and a drive shaft. So, the wheel is driven by the motor with positive revolution, and it has the inertia running situation with the stationary motor. Also, brake mechanisms, which is worked by servomotors for a radio control model (R/C), are located at the front of the wheels.
We develop a model wheelchair as shown in the figure to the right. It has a scale of 1 to 3, and 204 mm of a rear wheel diameter. The rear wheels are driven by D/C motors. The revolution of the motor is reduced to about 1/60 by several gears. An one-way-clutch is attached between each rear wheel and a drive shaft. So, the wheel is driven by the motor with positive revolution, and it has the inertia running situation with the stationary motor. Also, brake mechanisms, which is worked by servomotors for a radio control model (R/C), are located at the front of the wheels.
 Development Diary of the Model Wheelchair
Development Diary of the Model Wheelchair