手動車いす模型の開発 手動車いす模型の開発2001年11月 平田宏一,牧田安弘 |
 手動車いす模型の必要性
手動車いす模型の必要性 |
| 動揺している船舶における手動車いすは,操作が難しくなり,安全性に問題があることが明らかになりつつあります。しかし,実際の手動車いすを用いた実験では,船舶の動揺を模擬する大型実験装置あるいは実船実験の実施が必要となり,その実験はかなり大がかりになります。また,操作の熟練度等によって走行特性が大きく異なるため,詳細なデータ測定を行うことはかなり難しくなります。そこで,私たちは縮尺1/3の模型車いすの開発を行い,手動車いすの走行特性の測定を試みています。 |
|
手動車いすの操作 |
 手動車いすを操作する場合,操作者はハンドリムに断続的な駆動力を与えて走行します。そして,ブレーキ時にはハンドリムまたはタイヤに摩擦力を与えます。旋回時には,左右に異なる駆動力を与えるか,あるいは一方の車輪に駆動力を与え,もう一方の車輪にブレーキ力を与えます。 手動車いすを操作する場合,操作者はハンドリムに断続的な駆動力を与えて走行します。そして,ブレーキ時にはハンドリムまたはタイヤに摩擦力を与えます。旋回時には,左右に異なる駆動力を与えるか,あるいは一方の車輪に駆動力を与え,もう一方の車輪にブレーキ力を与えます。手動車いすの特徴は,駆動力が断続的に加わること,駆動力やブレーキ力が加わっていない状態,すなわち慣性走行の状態があること,自動車のようなハンドルがなく左右後輪の駆動力差で旋回することです。 また,前輪キャスタは自由に回転できるので,車いすが傾斜面を横断する場合,車いすは落下方向に回転する力を受けます。つまり,傾斜面や動揺している船舶で車いすをまっすぐに走らせるには,傾斜に応じた駆動・ブレーキの操作が必要となるのです。 |
|
手動車いす模型の開発 |
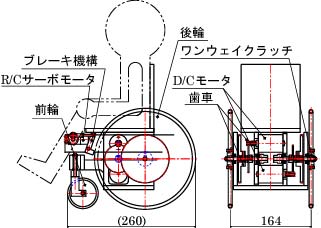 右図は,開発した車いす模型の構造です。縮尺は約1/3としていて,後輪の直径は204 mmです。左右後輪は2つの直流モータ(マブチRS-540)によって駆動されます。左右それぞれ4枚づつの平歯車によって,直流モータの回転を約1/60に減速しています。後輪と車軸の間にはワンウェイクラッチを取り付けてあり,直流モータが正方向に回転する場合には駆動力が与えられ,直流モータが静止している場合には慣性走行の状態になります。また,後輪の前方には,ラジコン模型用(R/C)サーボモータによるブレーキ機構が取り付けられています。
右図は,開発した車いす模型の構造です。縮尺は約1/3としていて,後輪の直径は204 mmです。左右後輪は2つの直流モータ(マブチRS-540)によって駆動されます。左右それぞれ4枚づつの平歯車によって,直流モータの回転を約1/60に減速しています。後輪と車軸の間にはワンウェイクラッチを取り付けてあり,直流モータが正方向に回転する場合には駆動力が与えられ,直流モータが静止している場合には慣性走行の状態になります。また,後輪の前方には,ラジコン模型用(R/C)サーボモータによるブレーキ機構が取り付けられています。
|
直流モータに接続されたR/Cアンプには,マイクロコンピュータ回路が取り付けられています。マイクロコンピュータに書き込まれたプログラムによって断続的な信号が送られます。 マイクロコンピュータのページ:詳細についてはこちらをご覧ください。
マイクロコンピュータのページ:詳細についてはこちらをご覧ください。 |

 |
|
傾斜面での走行試験 |
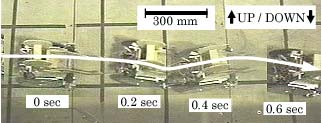
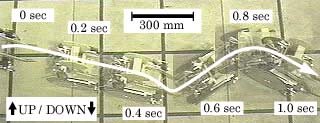
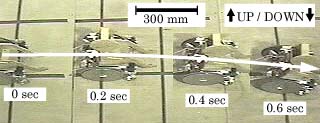
| 傾斜角度を3,5及び7°とした傾斜面を横断走行しました。その際,直進走行を保つように,山側ブレーキを手動でラジコン操作しました。そして,路面の上方に設置したビデオカメラによって走行軌跡を調べました。ブレーキ操作を手動で行っているため,走行軌跡はその操作によってかなり異なります。下の写真は,それぞれの傾斜角度における走行特性がよく現れた結果です。傾斜角度が小さい場合,一定の速度で直進走行ができるのに対し,傾斜角が大きくなると速度変動が大きく,左右への蛇行が大きくなっています。これは実際の車いすの走行特性や操作感によく一致しています。 |
 (a) 傾斜角3°の結果
|
|
付録 |
|
手動車いす模型の開発日誌
手動車いす模型のデモンストレーションムービー(MPEG1形式,4.4 MB)
手動車いす模型のCAD図面 |
| [ Barrier-free HOME ] [ NMRI HOME ] |
| このページに関するお問い合わせはkhirata@nmri.go.jpまでお願いします |