| 実験用魚ロボット「PF-300」 1999/10/17更新 平田宏一,藁科真一 
実験用魚ロボット「PF-300」実験用魚ロボット「Prototype Fish Robot, PF-300」は,旋回性能を着目して設計・試作しました。
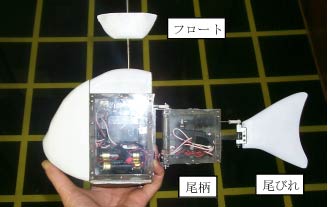
実験用魚ロボット「PF-300」の構造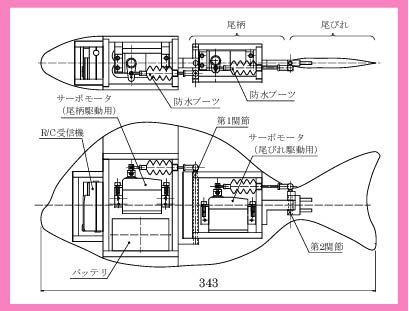 左の図は,PF-300の構造を示しています。全長は約340 mmで,頭部にR/C受信機,胴部にバッテリ及び尾柄を駆動させるサーボモータを配置し,尾柄には尾びれを駆動させるサーボモータを内蔵しています。リンク機構部の防水は,ゴム製の防水ブーツを使用しています。関節の位置は,タイの体形を参考にして概ね決定していますが,関節数が少ないこと,機械部品の形状などにより制限を受けています。
左の図は,PF-300の構造を示しています。全長は約340 mmで,頭部にR/C受信機,胴部にバッテリ及び尾柄を駆動させるサーボモータを配置し,尾柄には尾びれを駆動させるサーボモータを内蔵しています。リンク機構部の防水は,ゴム製の防水ブーツを使用しています。関節の位置は,タイの体形を参考にして概ね決定していますが,関節数が少ないこと,機械部品の形状などにより制限を受けています。頭部及び胴部の上部は,硬質発泡ウレタンを用いて外形を整えています。また,頭部及び胴部の下部には鉄製(S45C)のバランサ(おもり)を取り付けています。運転時には魚ロボットの上部に取り付けたアンテナにバルサ製のフロートを取り付けることで浮力をバランスさせて,一定の水深で運動させます。尾びれには硬質な木材を使用しています。 実験装置の概要 左の写真は,実験装置の外観です。約900mm×900mmの水槽を使用し,その約2m上にビデオカメラを設置しています。録画した画像から,旋回直径や360°当たりの旋回時間等を測定します。
左の写真は,実験装置の外観です。約900mm×900mmの水槽を使用し,その約2m上にビデオカメラを設置しています。録画した画像から,旋回直径や360°当たりの旋回時間等を測定します。
実験方法の概要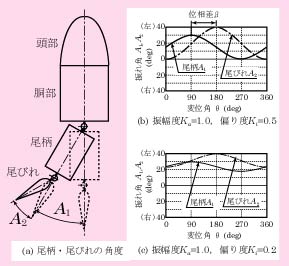 魚ロボットの運動形式は極めて多様です。以下では,旋回性能実験の第一段階として,尾柄・尾びれの運動を左右に偏らせて旋回性能を測定しました。
魚ロボットの運動形式は極めて多様です。以下では,旋回性能実験の第一段階として,尾柄・尾びれの運動を左右に偏らせて旋回性能を測定しました。右の図は運動形式の概略を示しています。胴部に対する尾柄の角度A1(deg)及び尾柄に対する尾びれの角度A2(deg)は次式で表されます。
A1=KaA1maxsinθ+A1max(1-Ka)Ki--------(1) ここで,A1max及びA2maxは尾柄及び尾びれの最大振れ角であり,以下の実験においてA1max =30 deg,A2max =40 degに設定しています。Kaは振幅の度合いを表す係数(0~1),Kiは偏りの度合いを表す係数(-1~1,直進時は0)です。Ka及びKiは尾柄と尾びれとで独立して設定できますが,以下の実験では全て同一な値としています。βは尾柄と尾びれとの位相差,θは2πft(f:周波数,t:時間)で表される変化角(0~360 deg)です。以下の実験においては,周波数fを2.2 Hz,位相差βを90 degに一定とし,振幅度Kaは0.2から0.5,偏り度Kiは0.6から1.0の範囲で測定を行いました。
実験結果の一例(正弦状の運動)下の写真は,旋回運動の合成写真です。これより,魚ロボットPF-300は,概ね適切な円運動を行っていることがわかります。
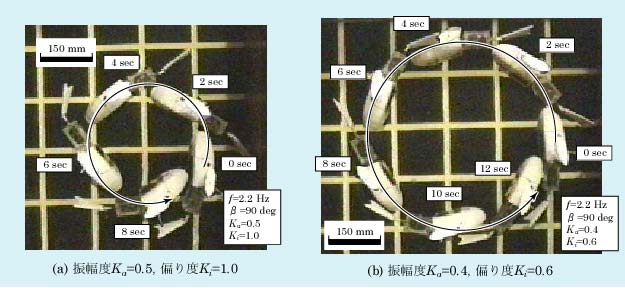 すべての実験結果はこちらでご覧いただけます。 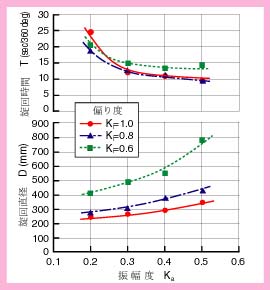 左の図は,振幅度に対する旋回直径及び360°当たりの旋回時間の関係を示しています。これより,振幅度Kaが小さいほど旋回直径Dが減少し,旋回時間Tが長くなることがわかります。これは振幅度Kaが小さいほど,魚ロボットの推力が小さくなるものの,尾柄及び尾びれの偏りが相対的に大きくなるためであると考えられます。また,旋回直径Dは,偏り度Kiの増大に伴い小さくなりますが,偏り度Kiが周期Tに与える影響はかなり小さいことがわかります。
左の図は,振幅度に対する旋回直径及び360°当たりの旋回時間の関係を示しています。これより,振幅度Kaが小さいほど旋回直径Dが減少し,旋回時間Tが長くなることがわかります。これは振幅度Kaが小さいほど,魚ロボットの推力が小さくなるものの,尾柄及び尾びれの偏りが相対的に大きくなるためであると考えられます。また,旋回直径Dは,偏り度Kiの増大に伴い小さくなりますが,偏り度Kiが周期Tに与える影響はかなり小さいことがわかります。
運転結果の一例(急旋回の例)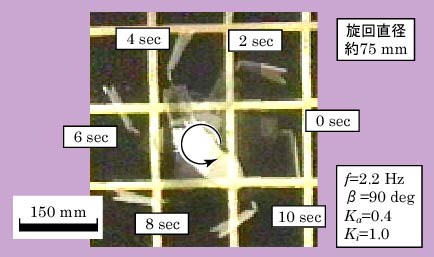 参考までに,急旋回(その場旋回)をさせているときの合成写真です。尾柄・尾びれの運動は正弦状ではありません。
参考までに,急旋回(その場旋回)をさせているときの合成写真です。尾柄・尾びれの運動は正弦状ではありません。
PF-300のCADデータPF-300のCADデータ(AutoCAD LT 2000,DWG形式)を準備しました。不十分な図面ですが,ご自由にお使いください。
PF-300のCADデータ(組立図のみ)(ZIP, 43kMB)
PF-300のビデオ4種類のビデオを準備しました。
(1) 急旋回で八の字運転をしています(Quick Time, 2.9MB)。 [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |
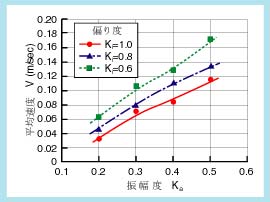 左の図は,振幅度に対する平均速度の関係を示しています。平均速度Vは,振幅度Kaの増大に伴って概ね直線的に上昇していることがわかります。また,平均速度Vは,偏り度Kiが小さいほど高くなっています。これは,振幅度Kaが大きく,偏り度Kiが小さいほど魚ロボットを前進させるための推力が増大するためであると考えられます。
左の図は,振幅度に対する平均速度の関係を示しています。平均速度Vは,振幅度Kaの増大に伴って概ね直線的に上昇していることがわかります。また,平均速度Vは,偏り度Kiが小さいほど高くなっています。これは,振幅度Kaが大きく,偏り度Kiが小さいほど魚ロボットを前進させるための推力が増大するためであると考えられます。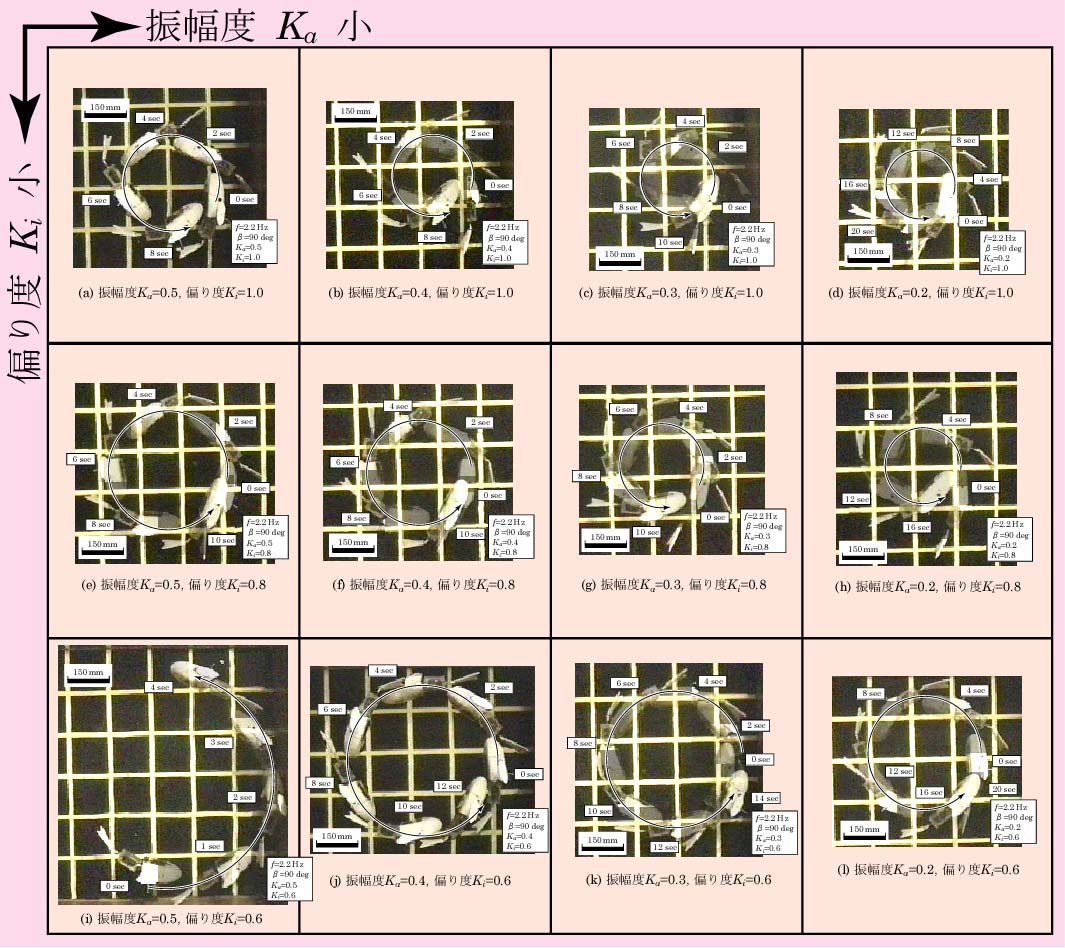{kind=link}