
PF-600開発日誌
~構想から実験まで~
2000/1/6更新 平田,宇田

1998年10月,構想
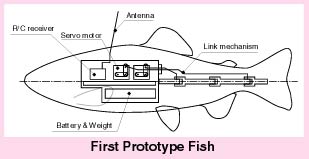
この頃から実験用魚ロボットの設計・試作を考え始めました。今までに製作した模型魚ロボットの経験や測定データなどを参考にしました。当初はニジマスをベースにして諸寸法を決めていきました。
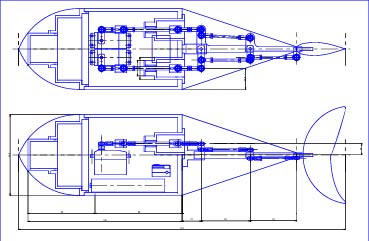
1999年7月,初期の組立図
最初の組立図が完成したのはこの頃です。部品を作ったり,組立をしながら修正が必要になります。
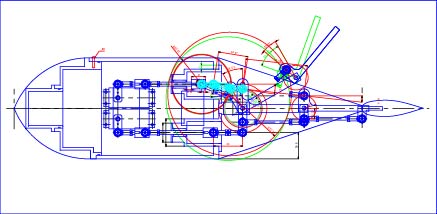
1999年9月,リンク機構の検討
どのような機構にすれば,魚のような滑らかな運動ができるのでしょうか。関節のリンク機構を検討しました。
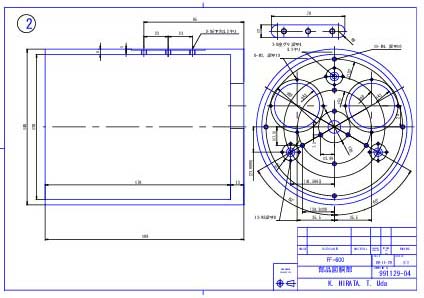
1999年11月,部品図作成
詳細な部品図を描くと同時に,部品の製作を始めたのがこの頃です。

1999年11月17日,胴体の製作
右の写真は,旋盤でPF-600の胴体(A2017)を削っているところです。
 四つ爪チャックを使ってリンク機構部分の加工をしています。
四つ爪チャックを使ってリンク機構部分の加工をしています。
 中ぐりをしています。内径が138mm,深さが176mmもありますのでかなり時間がかかります。
中ぐりをしています。内径が138mm,深さが176mmもありますのでかなり時間がかかります。
 最終的な厚さは5mmとかなり薄くなります。外周に荷造り用ゴムバンドを巻き付けて,ビビリを防いでいます。
最終的な厚さは5mmとかなり薄くなります。外周に荷造り用ゴムバンドを巻き付けて,ビビリを防いでいます。
 最後に外周を仕上げれば完成です。
最後に外周を仕上げれば完成です。

1999年11月19日,組立開始
大まかな部品ができあがってきました。徐々に組立を始めました。
1999年12月14日,完成間近

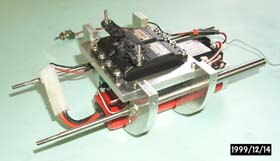 サーボモータの取付部はほとんど完成しています。写真(左)のサーボモータがPF-600の胴体に挿入されます。
サーボモータの取付部はほとんど完成しています。写真(左)のサーボモータがPF-600の胴体に挿入されます。
1999年12月17日,完成間近

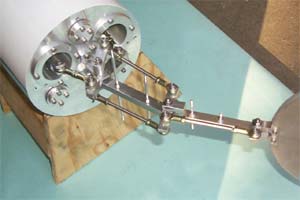 リンク機構も完成しました。あとは重力と浮力のバランスをとったり,シール部の調整をする作業が残っています。
リンク機構も完成しました。あとは重力と浮力のバランスをとったり,シール部の調整をする作業が残っています。
1999年12月24日,ついに泳ぎました
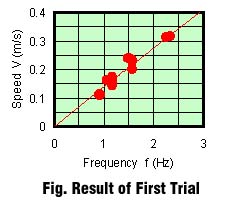
 まだ,尾柄部分や頭部分の修正・改良をする必要がありますが,ようやく泳ぎ始めました。簡単な測定の結果,2.2Hzほどの周波数で約0.3m/sの速度で泳ぐことを確認しました。まもなく実験が始まります。
まだ,尾柄部分や頭部分の修正・改良をする必要がありますが,ようやく泳ぎ始めました。簡単な測定の結果,2.2Hzほどの周波数で約0.3m/sの速度で泳ぐことを確認しました。まもなく実験が始まります。
2000年1月6日,実験開始!?
 いろいろな尾ひれを準備しました。左から,ニジマス形,マグロ形(ニジマス形と同一面積),マグロ形(実際のマグロの比率)です。
いろいろな尾ひれを準備しました。左から,ニジマス形,マグロ形(ニジマス形と同一面積),マグロ形(実際のマグロの比率)です。
[Experimental Fish Robot, PF-600]
[Experimental Fish Robots]
[Fish Robot Home Page]
Koichi Hirata
e-mail: khirata@nmri.go.jp (Office)
e-mail: khirata@gem.bekkoame.ne.jp (Home)