柾宆嫑儘儃僢僩乽PPF-01乿
October 21, Koichi Hirata

柾宆嫑儘儃僢僩乽PPF-01乿
 丂幚尡梡嫑儘儃僢僩偺愝寁傪偼偠傔傞慜偵丄乽侽師帋嶌嫑儘儃僢僩乿傪帋嶌偟傑偟偨丅偙偺侽師帋嶌嫑儘儃僢僩乽Pre-Prototype Fish Robot, PPF-01乿偼丄D/A僐儞僶乕僞傪庢傝晅偗偨僷僜僐儞偲巗斕偺儔僕僐儞梡僾儘億(2ch)偵傛偭偰墦妘惂屼偑偱偒傞傛偆偵側偭偰偄傑偡丅偨偩偟丄悈偺拞偵擖傟傞偙偲偼偱偒傑偣傫丅
丂幚尡梡嫑儘儃僢僩偺愝寁傪偼偠傔傞慜偵丄乽侽師帋嶌嫑儘儃僢僩乿傪帋嶌偟傑偟偨丅偙偺侽師帋嶌嫑儘儃僢僩乽Pre-Prototype Fish Robot, PPF-01乿偼丄D/A僐儞僶乕僞傪庢傝晅偗偨僷僜僐儞偲巗斕偺儔僕僐儞梡僾儘億(2ch)偵傛偭偰墦妘惂屼偑偱偒傞傛偆偵側偭偰偄傑偡丅偨偩偟丄悈偺拞偵擖傟傞偙偲偼偱偒傑偣傫丅
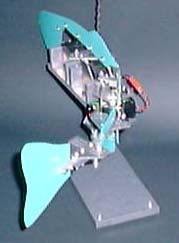
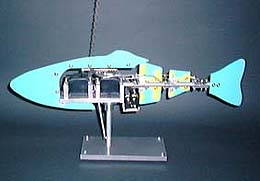
丂嵍偺幨恀偼丄PPF-01偺奜娤偱偡丅2偮偺僒乕儃儌乕僞偵傛偭偰3偮偺娭愡傪摦偐偡偙偲偱丄僗儉乕僘偱懡條側摦偒傪幚尰偱偒傑偡丅嫑儘儃僢僩偲壓偺戜偲偼丄廳怱廃傝偺夞揮偑偱偒傞傛偆偵庢傝晅偗偰偁傞偺偱丄棨忋偱摲懱傪怳傝側偑傜塣摦偟傑偡丅
丂PPF-01傪帋嶌偟偨栚揑偼丄
(1) 摦椡揱払婡峔乮儕儞僋婡峔乯偺摦嶌妋擣
(2) 僷僜僐儞偵傛傞R/C梡僾儘億惂屼偺妋擣
偱偡丅
摦椡揱払婡峔
 丂塃偺恾偼PPF-01偵梡偄偨摦椡揱払婡峔乮儕儞僋婡峔乯偺奣棯偱偡丅偙偺婡峔偼丄2偮偺僒乕儃儌乕僞偵傛偭偰3偮偺娭愡傪摦偐偟偰偄傑偡丅僒乕儃儌乕僞ch1偼娭愡1偲娭愡2偲傪摦偐偟丄僒乕儃儌乕僞ch2偼娭愡3傪摦偐偟傑偡丅
丂塃偺恾偼PPF-01偵梡偄偨摦椡揱払婡峔乮儕儞僋婡峔乯偺奣棯偱偡丅偙偺婡峔偼丄2偮偺僒乕儃儌乕僞偵傛偭偰3偮偺娭愡傪摦偐偟偰偄傑偡丅僒乕儃儌乕僞ch1偼娭愡1偲娭愡2偲傪摦偐偟丄僒乕儃儌乕僞ch2偼娭愡3傪摦偐偟傑偡丅
丂摨恾(a)偼丄娭愡1傪摦偐偡儕儞僋婡峔偱偡丅僒乕儃儌乕僞ch1偍傛傃儕儞僋1偵屌掕偝傟偨僋儔儞僋1A偺僋儔儞僋挿偝偲偑摍偟偄応崌丄僒乕儃儌乕僞ch1偲僋儔儞僋1A偺夞揮妏偼摍偟偔側傝傑偡丅摨恾(b)偼丄娭愡2偺婡峔偱偡丅娭愡1偵僋儔儞僋1A偲偼暿偺僋儔儞僋1B傪帺桼偵夞揮塣摦偑偱偒傞傛偆偵庢傝晅偗丄僋儔儞僋1B偲儕儞僋2偵屌掕偝傟偨僋儔儞僋2B偲傪寢崌偟偰偄傑偡丅僒乕儃儌乕僞ch1丄僋儔儞僋1B偍傛傃2B偺僋儔儞僋挿偝偲傪揔媂愝掕偡傞偙偲偱丄僋儔儞僋2B偺夞揮妏搙偼丄僒乕儃儌乕僞ch1偲摨埵憡偱擟堄偺夞揮妏搙偵偱偒傑偡丅
丂摨恾(c)偼丄娭愡3偺婡峔偱偡丅娭愡2偺婡峔偲摨條丄娭愡1偲娭愡2偵偦傟偧傟帺桼偵夞揮塣摦偑偱偒傞僋儔儞僋1C偍傛傃2C傪庢傝晅偗丄偝傜偵僋儔儞僋2C偲儕儞僋3乮旜傂傟乯偵屌掕偝傟偨僋儔儞僋3C偲傪寢崌偟偰偄傑偡丅僒乕儃儌乕僞ch2偍傛傃偦傟偧傟偺僋儔儞僋挿偝偑摍偟偄応崌丄僋儔儞僋3C偺夞揮妏搙偼丄娭愡1偍傛傃娭愡2偺夞揮妏搙偵塭嬁傪庴偗偢丄僒乕儃儌乕僞ch2偺夞揮妏搙偲摍偟偔側傝傑偡丅
[ View of Model Fish Robots ]
[ Fish Robot Home Page ]
[ Power and Energy Engineering Division ]
[ Hirata HOME ]
[ NMRI HOME ]
|