| 模型魚ロボット「PPF-06i」 July 3, 2000 by Koichi Hirata 
模型魚ロボット「PPF-06i」マイクロコンピュータを搭載した模型魚ロボット「PPF-06i」を紹介します。自律化を目指す第一歩として,この魚ロボットの開発を始めました。


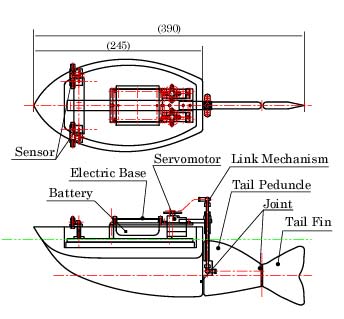
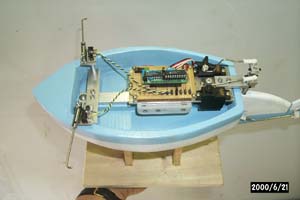
基本構造まずは,(i) マイクロコンピュータでラジコン用サーボモータを動かして魚ロボットを泳がせること,(ii) センサを搭載してその信号によって簡単な運動制御をすること,を目指しました。マイクロコンピュータのプログラム変更を容易にするため,マイクロコンピュータを魚ロボットの上面に配置する構造としました。したがって,全体の形としては,船の形をしたフロートの後部に魚形推進機構を取り付けることになりました。2個のラジコン用サーボモータで尾柄と尾ひれを独立して動かすことができます。サーボモータ,バッテリ(単3×4本),触覚センサ(マイクロスイッチ)はバルサ製のフロート内に配置されています。フロートの上部でサーボモータと尾ひれがつなげられているため,駆動部での水密シールは必要ありません。尾柄,尾ひれは硬質な木材を使用しています。
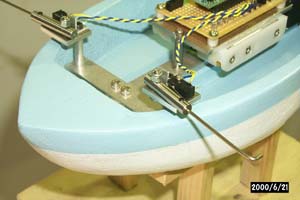
触覚センサマイクロスイッチを利用した触覚センサを取り付けました。触覚センサが感知すると,その信号がマイクロコンピュータに送られます。適切なプログラムを作成することで,障害物等を回避させることができると考えていますが,まだそのようなプログラム開発には至っていません。また,魚ロボットを泳がせて,触覚センサの動作を確認したのですが,センサが壁に接触してもマイクロスイッチが正しく機能しませんでした。センサの取り付け方や構造に改良が必要であると考えています。
まとめ 尾柄と尾ひれを周期的に左右に振動させるマイクロコンピュータのプログラムを動作させて,ある程度の速度(0.1m/s程度?)で推進することを確認しました。また,尾柄と尾ひれを一方に偏らせて運動させることで,旋回すること(旋回直径1m程度?)を確認しました。「マイクロコンピュータで魚ロボットを泳がせる」という,当初の開発目的は達成したと考えています。必要に応じて,速度や旋回直径の計測を行う予定です。
尾柄と尾ひれを周期的に左右に振動させるマイクロコンピュータのプログラムを動作させて,ある程度の速度(0.1m/s程度?)で推進することを確認しました。また,尾柄と尾ひれを一方に偏らせて運動させることで,旋回すること(旋回直径1m程度?)を確認しました。「マイクロコンピュータで魚ロボットを泳がせる」という,当初の開発目的は達成したと考えています。必要に応じて,速度や旋回直径の計測を行う予定です。一方,「センサによる運動制御」という目的には達成していません。これは,魚ロボットの運動性能が十分ではなく(さらに改良の余地があるという意味),別の魚ロボットを開発した方がよいと考えたためです。  魚ロボットを作ろう(木材加工編) PPF-06iのムービー(MPEG, 1.2MB) [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |