Model Fish Robot, PPF-08i
Design Concept of the PPF-08i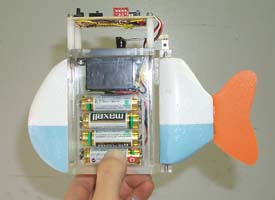
 The model fish robot named PPF-08i has been developed after considering the previous model fish robots, PPF-06i and PPF-07i. The design concept and purposes are as follows:
The model fish robot named PPF-08i has been developed after considering the previous model fish robots, PPF-06i and PPF-07i. The design concept and purposes are as follows:(1) Simple structure (2) Small size (3) High turning performance (small turning diameter), (4) Controlled by a microcomputer, (5) A basic model of the group robots.
Basic Structure of the PPF-08i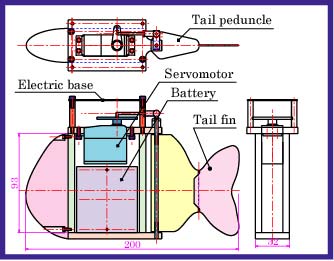 What is needed to obtain a small turn diameter of a fish robot? A thin body width and tall body height. Also, in order to get a large amplitude the tail push, the basic structure included a large tail fin. All was decided.
What is needed to obtain a small turn diameter of a fish robot? A thin body width and tall body height. Also, in order to get a large amplitude the tail push, the basic structure included a large tail fin. All was decided.To get a simple structure, one servomotor moves the tail fin as the same of the PPF-07i. The servomotor and batteries are located in an acrylic body case. The cells are located in flat line so a thin body width of only 32 mm is realized. For weight and buoyancy, the head and the tail peduncle are made of balsa. The tail fin is made of soft plastic board.
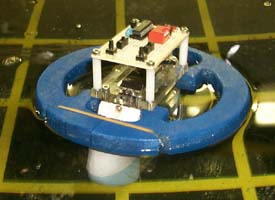
Swimming of the PPF-08iI made mistakes estimating weight, the center of gravity and buoyancy. The weight was over 50 g. It is equaled to a draft of 20 mm. Therefore, the PPF-08i needed a swimming float.The PPF-08i is a good swimmer! The maximum speed is about 0.12 m/s, and the minimum turning diameter is about 200 mm. That is good performance for a fish still wearing a life ring and not yet out of school!

 Developmental Diary of the PPF-08i Various Versions of the PPF-08i Movie of PPF-08i (MPEG, 1.2 MB) [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |