模型魚ロボット「PPF-08i」
PPF-08iの設計コンセプト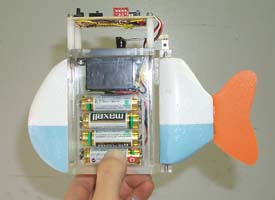
 今までに設計・試作した模型魚ロボットPPF-06i,PPF-07iの問題点を踏まえて,新しい模型ロボットPPF-08iを開発しました。設計コンセプトおよび開発目的は以下の通りです。
今までに設計・試作した模型魚ロボットPPF-06i,PPF-07iの問題点を踏まえて,新しい模型ロボットPPF-08iを開発しました。設計コンセプトおよび開発目的は以下の通りです。(1) 簡単な構造とする。 (2) 小型にする。 (3) 旋回性に優れる(小さい旋回直径)。 (4) マイクロコンピュータで動かす。 (5) 「群れロボット」のベースモデルとする。
PPF-08iの基本構造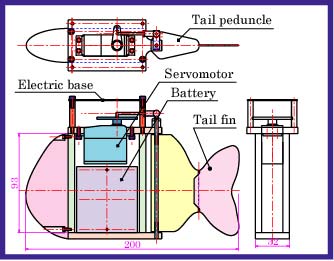 魚ロボットに小回りをさせるにはどのようにすればよいのでしょうか。いろいろと考えた結果,今回試作する模型魚ロボットでは,体幅をできるだけ薄くし,体高をやや高くすることにしました。また,尾を大きく偏らせて振ることができるように,尾の振れ幅が大きくとれる構造としました。
魚ロボットに小回りをさせるにはどのようにすればよいのでしょうか。いろいろと考えた結果,今回試作する模型魚ロボットでは,体幅をできるだけ薄くし,体高をやや高くすることにしました。また,尾を大きく偏らせて振ることができるように,尾の振れ幅が大きくとれる構造としました。構造を簡単にするため,模型魚ロボットPPF-07iと同様,1つのラジコン用サーボモータで尾ひれを動かすこととしました。サーボモータとバッテリ(単3×4本)は,アクリル製のケースの内部に配置しました。4本の電池をフラットに配置することにより体幅を32mmとすることができました。浮力と重量のバランスを考えて,頭部と尾柄はバルサ材で製作しました。尾ひれは軟質なプラスチック板を使用しています。
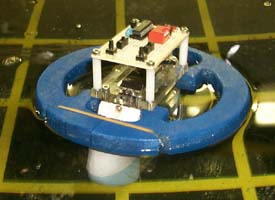
PPF-08iの泳ぎ重心,浮心,重量の見積もりを誤り,重量は予定より50gも超過しました。これは20mm程度の喫水に相当します。そのため,バルサ製の浮き輪をつけて泳がせました。結構よく泳ぎます。直進速度は0.12m/s程度,最小旋回直径は200mm程度です。重量の見積もりを誤った以外は,ほぼ想像していた通りです。

 模型魚ロボットPPF-08iの開発日誌 模型魚ロボットPPF-08iの様々な形式 PPF-08iのムービー(MPEG, 1.2MB) [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |