Various Versions of the PPF-08i
PPF-08i Type A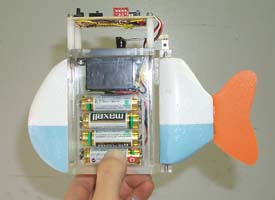
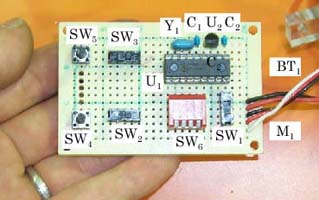
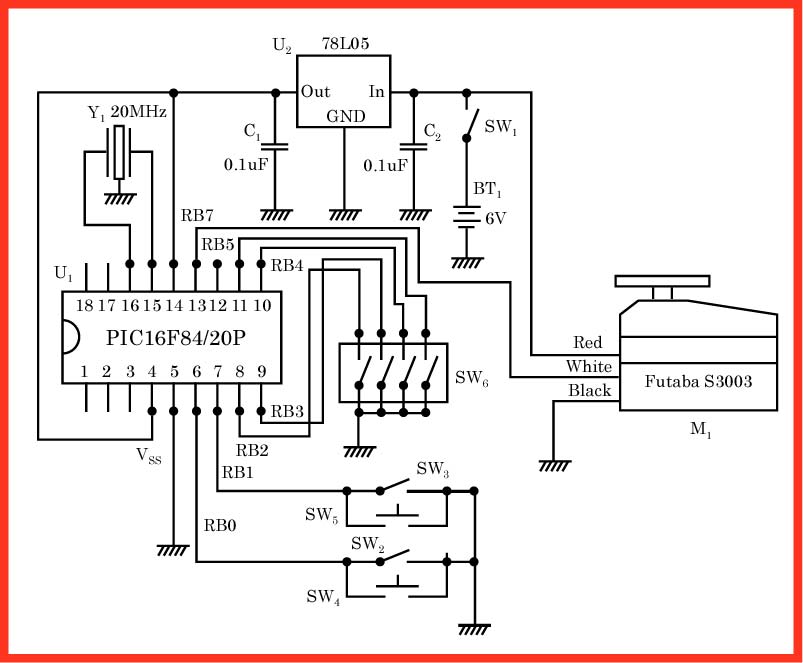
 Type A is the most fundamental model of the PPF-08i. A one-chip microcomputer, PIC is used for the control. The PPF-08i Type A is moved by setting values of frequency and amplitude, for straight motion or turning motion, by the program in the microcomputer.
Type A is the most fundamental model of the PPF-08i. A one-chip microcomputer, PIC is used for the control. The PPF-08i Type A is moved by setting values of frequency and amplitude, for straight motion or turning motion, by the program in the microcomputer.
PPF-08i Type B Dr. Sugawara developed Type B. Type B has a microcomputer and two infrared ray sensors to avoid obstacles. The electric base for the microcomputer and sensors is used the marketing kit.
Dr. Sugawara developed Type B. Type B has a microcomputer and two infrared ray sensors to avoid obstacles. The electric base for the microcomputer and sensors is used the marketing kit.
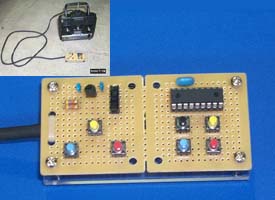
PPF-08i Type CType C has an R/C receiver and it receives commands by a radio control. In order to move the servomotor appropriately, control parameters in the microcomputer are set via an R/C transmitter.The belows photograph shows the controller. The PPF-08i is moved forward, or to right turn or left turn with very a simple operation. With more sophisticated software, it is capable of more complex motions.

[ View of Model Fish Robots ] [ Fish Robot Home Page ] [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |