「模型魚ロボットPPF-09」開発日誌
2002/2/7 構想開始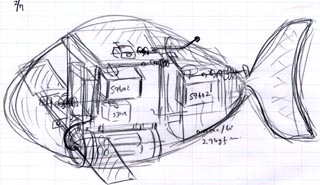 2001年度に開発を進めてきた実験用魚ロボットUPF-2001では,フィンを取り付けることで上下運動を試みました。上下運動についてはまずまずの結果が得られましたが,ラダーによる旋回は好ましい結果が得られていません。そこで,上下運動と旋回運動を含めた3次元運動をデモンストレーションするため,比較的小型な模型魚ロボットを試作することとしました。右の絵は,最初のスケッチです。基本的には実験用魚ロボットPF-300をベースとし,2つのサーボモータで尾ひれを動かし,その動きで旋回させます。上下運動はUPF-2001と同様,フィンを取り付けることにしました。
2001年度に開発を進めてきた実験用魚ロボットUPF-2001では,フィンを取り付けることで上下運動を試みました。上下運動についてはまずまずの結果が得られましたが,ラダーによる旋回は好ましい結果が得られていません。そこで,上下運動と旋回運動を含めた3次元運動をデモンストレーションするため,比較的小型な模型魚ロボットを試作することとしました。右の絵は,最初のスケッチです。基本的には実験用魚ロボットPF-300をベースとし,2つのサーボモータで尾ひれを動かし,その動きで旋回させます。上下運動はUPF-2001と同様,フィンを取り付けることにしました。
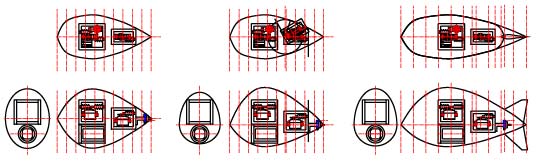
2000/2/8 サーボモータの配置と胴体形状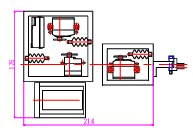 CADを使って,サーボモータの配置を検討しました(右図)。できる限り小さくしたいのですが,ケース内になかなかうまく収まりません。さらに流線形の胴体を検討しました(下図)。側面形状はまずまずですが,平面形状(上から見た形状)はスマートな形になりません。
CADを使って,サーボモータの配置を検討しました(右図)。できる限り小さくしたいのですが,ケース内になかなかうまく収まりません。さらに流線形の胴体を検討しました(下図)。側面形状はまずまずですが,平面形状(上から見た形状)はスマートな形になりません。
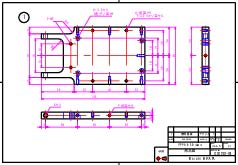
 2002/2/9 大まかな構想図(組立図)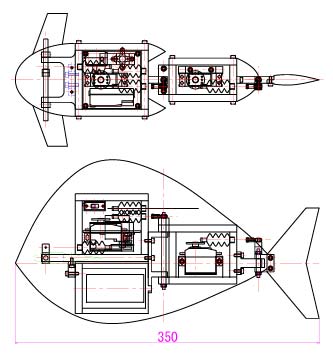 ある程度のところで妥協しました。右図は現状での構想図(組立図の前段階)です。全長は350 mmで,側面形状はかなり太めの流線形,平面形状は胴体と尾柄のケース形状をそのままとしています。
ある程度のところで妥協しました。右図は現状での構想図(組立図の前段階)です。全長は350 mmで,側面形状はかなり太めの流線形,平面形状は胴体と尾柄のケース形状をそのままとしています。胴体と尾柄は四角い箱とし,胴体の下部には円柱形状のバッテリケースを配置することにしました。使用するサーボモータは3個です。
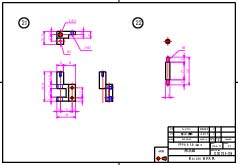
2000/2/10 部品図の作成部品の試作を始めるために,部品図を作成しました。試作する部品は全部で23種類で,ほとんどの部品はフライス加工になりそうです。
 2002/2/13 板材の切り出し アクリルとアルミニウム合金の板材を切り出しました。本日の作業はそれだけです。
アクリルとアルミニウム合金の板材を切り出しました。本日の作業はそれだけです。2002/2/16 アクリル材の端面仕上げ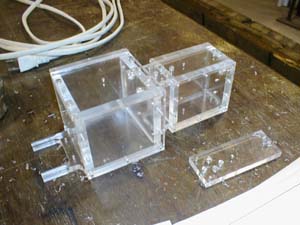 アクリルの外形寸法を仕上げました。穴あけやねじ切りはまだ完成していません。十分な時間がとれず,作業はやや停滞気味です。
アクリルの外形寸法を仕上げました。穴あけやねじ切りはまだ完成していません。十分な時間がとれず,作業はやや停滞気味です。
2002/2/17 - 2002/6/12 作業中断 仕事の都合により,模型魚ロボットの製作作業が中断しています。
仕事の都合により,模型魚ロボットの製作作業が中断しています。2002/6/20 作業再開 4ヶ月ぶりに模型魚ロボットの製作作業を再開しました。
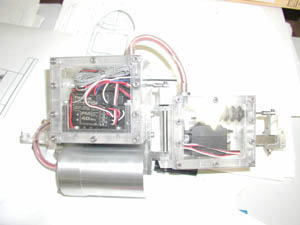
4ヶ月ぶりに模型魚ロボットの製作作業を再開しました。2002/6/26 金属加工,ほぼ終了細かい調整部品を除く金属加工が終了しました。
 2002/7/3 木材加工胴体や尾柄,尾ひれの木材部品(ラワン)を製作しました。クリアラッカーを塗り,水中に入れることもできました。

 2002/7/8 - 2002/7/9 マイコン回路の製作とプログラムの開発ラジコン操縦用のマイクロコンピュータ回路を製作しました。A/Dコンバータを使用することにより,ラジコン飛行機のような操縦ができます。

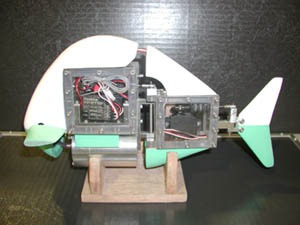
 2002/7/10 - 2002/7/11 ペイントPPF-09にペイントしました。今回は白とミントグリーンのツートンにしました。構想開始から5ヶ月(途中,長期の休みがありましたが),ようやくPPF-09が完成しました。

 [ Fish Robot Home Page ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |