| 実験用魚ロボット「UPF-2001」 2002/2/4更新 平田宏一,河合秀祐 
 魚ロボットの高性能化・多機能化
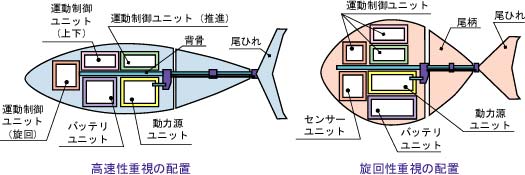
魚ロボットの高性能化・多機能化魚ロボットの高性能化・多機能化を目指します。高性能化とは,本当の魚のように上手に泳ぐことです。そのために,簡単な構造で,しかも尾ひれのしなやかな運動を実現できる特殊な機構を採用しました。また,多機能化とは,様々な用途で使うことができる魚ロボットを開発することです。そのために動力部や運動制御部などの各要素をユニット化することにしました。
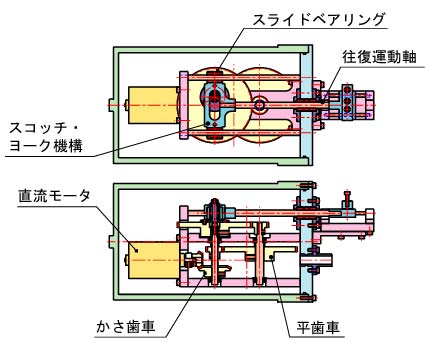
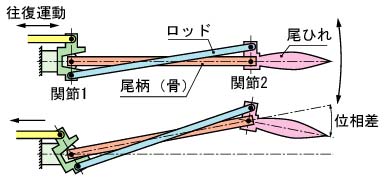
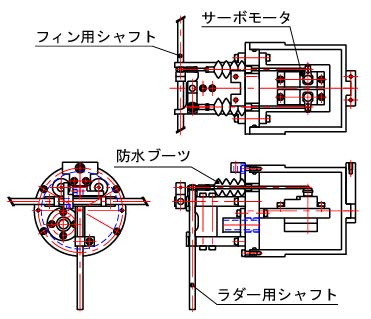
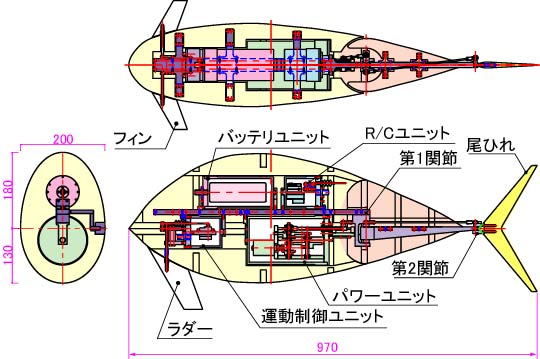
実験用魚ロボット「UPF-2001」の基本構造高性能・高機能を目指したユニット式魚ロボット「UPF-2001」は全長約1 mです。右図のように,直流モータと減速用歯車が内蔵されるパワーユニット,バッテリユニット,ラジコン受信機とアンプを内蔵したR/Cユニット,旋回運動と上下運動のための運動制御ユニット,特殊な機構を持つ尾部ユニットから構成されています。
主要構成ユニットの概要
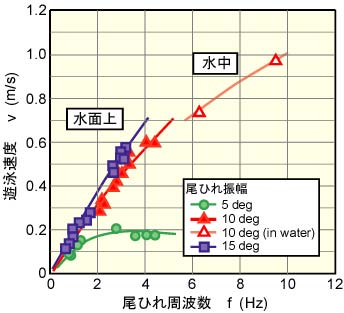
実験用魚ロボット「UPF-2001」の遊泳速度
右図はUPF-2001の遊泳速度を測定した結果です。尾部の振幅(片側)を10 degおよび15 degとした場合,胴体が水面上に20 mm程度露出している状態において,遊泳速度は周波数の上昇に伴ってほぼ直線上に増加しています。水中を遊泳している場合,最高速度は約0.97 m/sでした。これは,現在までに開発した魚ロボットよりかなり速い速度です。尾ひれの寸法や形状などを改良することによって,さらに高速化ができると考えています。
  UPF-2001開発日誌(随時更新中)パワーユニットの詳細尾ひれの運動(準備中)胴体形状と流体特性尾ひれ形状について(準備中)運動制御について(準備中)UPF-2001のCAD図面UPF-2001のムービー UPF-2001開発日誌(随時更新中)パワーユニットの詳細尾ひれの運動(準備中)胴体形状と流体特性尾ひれ形状について(準備中)運動制御について(準備中)UPF-2001のCAD図面UPF-2001のムービー[ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] | |
| Contact khirata@nmri.go.jp |