Model Fish Robot, PPF-04
Updated on January 14, 1999 by Koichi Hirata

Model Fish Robot, PPF-04 can be controled with wireless, using a personal computer with a D/A converter and a 2 ch radio control device (R/C). The R/C mdevice is water proof by an acrylic fiber box, and the PPF-04 can swim in the water.
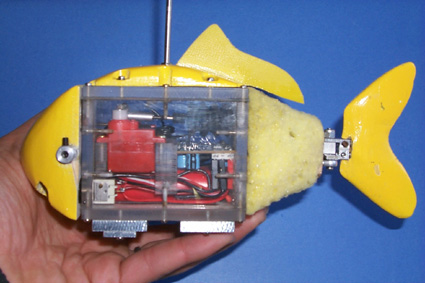 A feature of the PPF-04 is shown in the left photograph. In order to swim in a small water tank like a home bath, its size is as possible as compact (190 mm body length, 400 g weight). Targets of the manufacturing the PPF-04 are;
A feature of the PPF-04 is shown in the left photograph. In order to swim in a small water tank like a home bath, its size is as possible as compact (190 mm body length, 400 g weight). Targets of the manufacturing the PPF-04 are;
(1) Confirmation of the relation between the moving pattern and propulsion performance,
(2) Confirmation of the relation between the moving pattern and turning performance,
(3) Development of the control program,
(4) Confirmation of the R/C device in the water,
(5) Discussion about a measuring system for the performance.
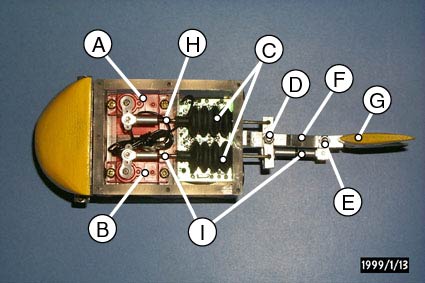 This photograph is upper view of the PPF-04. Symbol A is a servo motor for the tail part (ch0), B is a servo motor for the tail fin (ch1), C is water proof boots, D is a No. 1 joint, E is a No. 2 joint, F is the tail part, G is the tail fin, H is a link mechanism for the tail part, and I is a link mechanism for the tail fin.
This photograph is upper view of the PPF-04. Symbol A is a servo motor for the tail part (ch0), B is a servo motor for the tail fin (ch1), C is water proof boots, D is a No. 1 joint, E is a No. 2 joint, F is the tail part, G is the tail fin, H is a link mechanism for the tail part, and I is a link mechanism for the tail fin.
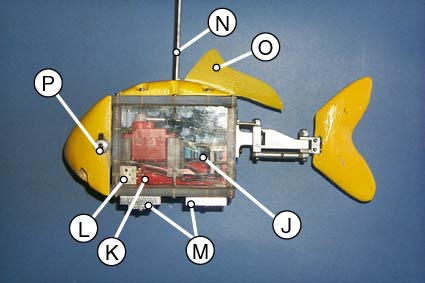 This photograph is side view of the PPF-04. Symbol J is a R/C receiver, K is a Ni-Cd battery, L is an electric switch, M is balance weights, N is an antenna, O is a back fin, and P is holes for breast fins.
This photograph is side view of the PPF-04. Symbol J is a R/C receiver, K is a Ni-Cd battery, L is an electric switch, M is balance weights, N is an antenna, O is a back fin, and P is holes for breast fins.
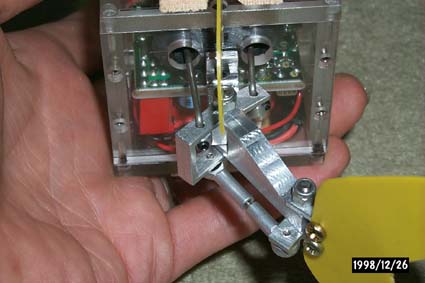 The link mechanism for the PPF-04 is shown in the left photograph. The two servo motors move the two joints. The right servo motor moves the tail part, and the left servo motor moves the tail fin.
The link mechanism for the PPF-04 is shown in the left photograph. The two servo motors move the two joints. The right servo motor moves the tail part, and the left servo motor moves the tail fin.
Video of the PPF-04
Turning performance of the PPF-04
Relation between the speed and frequency
Relation between the speed and phase angle
Measurement of electric power
[ View of Model Fish Robots ]
[ Fish Robot Home Page ]
[ Power and Energy Engineering Division ]
[ Hirata HOME ]
[ NMRI HOME ]
|