模型魚ロボット「PPF-04」
Updated on January 14, 1999 by Koichi Hirata

模型魚ロボットPPF-04は、D/Aコンバータを取り付けたパソコンと市販のラジコン用2chプロポによって遠隔操縦ができます。ラジコンのメカ部をアクリル製のケースに入れることで、水の中で運転することができます。
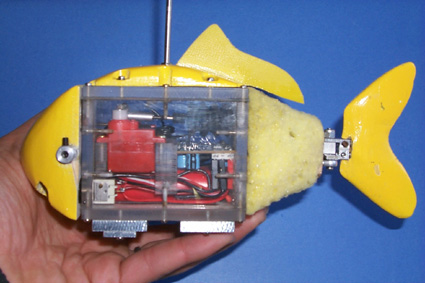 左の写真は、PPF-04の外観です。浴槽程度の小さな水槽で動作確認ができるように、できる限り小さくしています(全長約190mm、全重量約400g)。PPF-04を試作した目的は、
左の写真は、PPF-04の外観です。浴槽程度の小さな水槽で動作確認ができるように、できる限り小さくしています(全長約190mm、全重量約400g)。PPF-04を試作した目的は、
(1) 運動パターンと推進性能の確認
(2) 運動パターンと旋回性能の確認
(3) 運動制御プログラムの開発
(4) 魚ロボットのR/Cによる遠隔操作の確認
(5) 魚ロボットの推進特性における測定方法の検討
です。
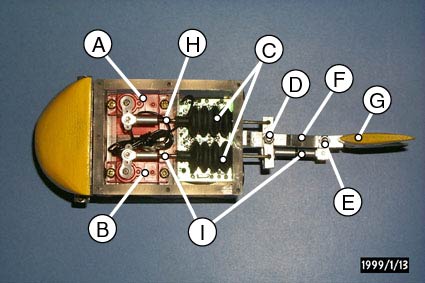 PPF-04を上から見た写真です。A: 尾柄を駆動するサーボモータ(ch0)、B: 尾ひれを駆動するサーボモータ(ch1)、C: 防水ブーツ、D: 第1関節、E: 第2関節、F: 尾柄、G: 尾ひれ、H: 尾柄を駆動するリンク機構、I: 尾ひれを駆動するリンク機構です。
PPF-04を上から見た写真です。A: 尾柄を駆動するサーボモータ(ch0)、B: 尾ひれを駆動するサーボモータ(ch1)、C: 防水ブーツ、D: 第1関節、E: 第2関節、F: 尾柄、G: 尾ひれ、H: 尾柄を駆動するリンク機構、I: 尾ひれを駆動するリンク機構です。
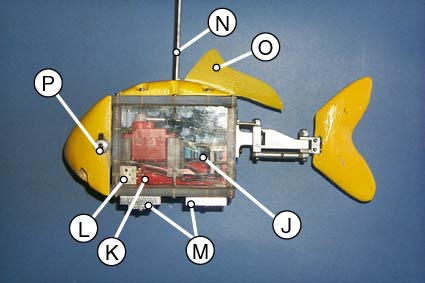 PPF-04を横から見た写真です。J: 受信機、K: バッテリ、L: スイッチ、M: おもり、N: アンテナ、O: 背ひれ、P: 胸ひれ取付け部です
PPF-04を横から見た写真です。J: 受信機、K: バッテリ、L: スイッチ、M: おもり、N: アンテナ、O: 背ひれ、P: 胸ひれ取付け部です
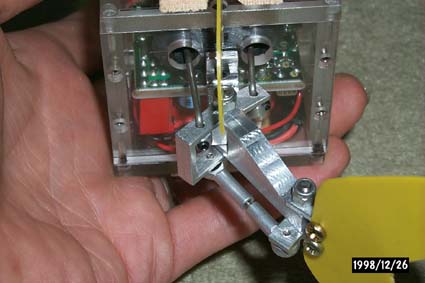 左の写真はPPF-04のリンク機構です。2つのサーボモータで2つの関節を動かしています。向かって右側の機構は尾柄を動かし、左側の機構は尾ひれを動かしています。
左の写真はPPF-04のリンク機構です。2つのサーボモータで2つの関節を動かしています。向かって右側の機構は尾柄を動かし、左側の機構は尾ひれを動かしています。
PPF-04のビデオ
PPF-04の旋回性能
周波数と速度の関係
位相差と速度の関係
消費電力の測定
[ View of Model Fish Robots ]
[ Fish Robot Home Page ]
[ Power and Energy Engineering Division ]
[ Hirata HOME ]
[ NMRI HOME ]
|