Relation between the speed and pahse angle of the PPF-04
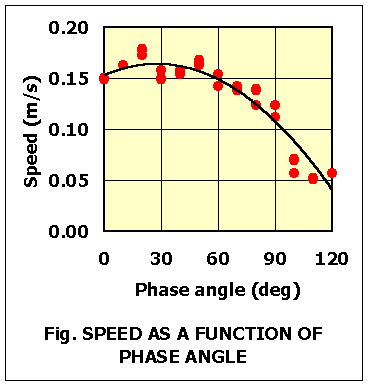 A right figure shows an experimental result of the PPF-04. As the operating conditions, frequency is 3 Hz, and a moving angle is 30 degrees each side from the center line. This result shows that the maximum swimming speed is in 20 to 30 degrees phase angle. The reason is considered that the force to the water increases at the smaller phase angle, because the vibration at the end of the tail fin increases (see a below figure). It is considered that this performance is effected by the feature of the body and tail fin.
A right figure shows an experimental result of the PPF-04. As the operating conditions, frequency is 3 Hz, and a moving angle is 30 degrees each side from the center line. This result shows that the maximum swimming speed is in 20 to 30 degrees phase angle. The reason is considered that the force to the water increases at the smaller phase angle, because the vibration at the end of the tail fin increases (see a below figure). It is considered that this performance is effected by the feature of the body and tail fin.In this experiment, the maximum speed is about 0.18 m/s under 20 degrees phase angle. This maximum speed is one body length (190 mm) per one second. It is considered that it is not enough performance, because real high speed fish can swim about ten times of body length per one second. (Of course, the PPF-04 does not aim the high speed cruise.)
 Video of the PPF-04 Turning performance of the PPF-04 Relation between the speed and frequency Measurement of electric power [ View of Model Fish Robots ] [ Fish Robot Home Page ] [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |
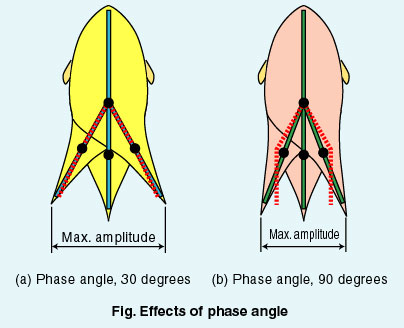 A right figure shows the motions of the tailpart and fin, when the phase angle is 30 degrees and 90 degrees. Red lines in the figure are locationsof the joint, when the tail part is the maximum amplitude (30 degees). The vibration at the end of the tail fin increases at smaller phase angle. When the PPF-04 is moved with above condition, the maximum amplitude is 72 mm at the phase angle, 30 degrees. And the maximum amplitude is 54 mm at the phase angle, 90 degrees.
A right figure shows the motions of the tailpart and fin, when the phase angle is 30 degrees and 90 degrees. Red lines in the figure are locationsof the joint, when the tail part is the maximum amplitude (30 degees). The vibration at the end of the tail fin increases at smaller phase angle. When the PPF-04 is moved with above condition, the maximum amplitude is 72 mm at the phase angle, 30 degrees. And the maximum amplitude is 54 mm at the phase angle, 90 degrees.