埵憡嵎偲懍搙偺娭學
 丂塃偺恾偼丄PPF-04偵偍偗傞旜暱偲旜傂傟偲偺埵憡嵎偵懳偡傞懍搙偺幚尡寢壥偱偡丅廃攇悢偼3Hz丄拞怱幉偐傜嵍塃偵嵟戝30亱偢偮塣摦偝偣偰偄傑偡丅堦斒偵偼90亱偺埵憡嵎偱塣揮偝偣偨応崌偵嵟傕崅偄岠棪偑摼傜傟傞偲尵傢傟偰偄傑偡偑丄杮幚尡偱偼丄埵憡嵎偑20乣30亱掱搙偱嵟崅懍搙偑摼傜傟偰偄傞偙偲偑傢偐傝傑偡丅偙傟偼埵憡嵎偑彫偝偄傎偳旜傂傟屻抂晹偺嵟戝怳暆偑戝偒偔側傞偺偱丄悈傪悇偡椡偑憹戝偡傞偨傔偱偁傞偲峫偊傜傟傑偡乮塃壓恾嶲徠乯丅偙偺傛偆側摿惈偼丄嫑儘儃僢僩偺懱宍傗旜傂傟偺宍忬偵戝偒偔塭嬁傪庴偗傞偲峫偊傜傟傑偡丅
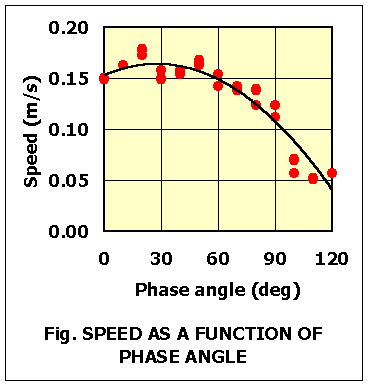
丂塃偺恾偼丄PPF-04偵偍偗傞旜暱偲旜傂傟偲偺埵憡嵎偵懳偡傞懍搙偺幚尡寢壥偱偡丅廃攇悢偼3Hz丄拞怱幉偐傜嵍塃偵嵟戝30亱偢偮塣摦偝偣偰偄傑偡丅堦斒偵偼90亱偺埵憡嵎偱塣揮偝偣偨応崌偵嵟傕崅偄岠棪偑摼傜傟傞偲尵傢傟偰偄傑偡偑丄杮幚尡偱偼丄埵憡嵎偑20乣30亱掱搙偱嵟崅懍搙偑摼傜傟偰偄傞偙偲偑傢偐傝傑偡丅偙傟偼埵憡嵎偑彫偝偄傎偳旜傂傟屻抂晹偺嵟戝怳暆偑戝偒偔側傞偺偱丄悈傪悇偡椡偑憹戝偡傞偨傔偱偁傞偲峫偊傜傟傑偡乮塃壓恾嶲徠乯丅偙偺傛偆側摿惈偼丄嫑儘儃僢僩偺懱宍傗旜傂傟偺宍忬偵戝偒偔塭嬁傪庴偗傞偲峫偊傜傟傑偡丅丂杮幚尡偱摼傜傟偨嵟崅懍搙偼丄埵憡嵎20亱偵偍偄偰丄栺0.18m/s偱偟偨丅偙偺嵟崅懍搙偼丄1昩娫偵奣偹PPF-04偺慡挿乮190mm乯偲摨偠嫍棧傪恑傫偱偄傞偙偲偵側傝傑偡丅幚嵺偺嫑偑1昩娫偵懱挿偺10攞掱搙傕偺嫍棧傪恑傓偙偲偐傜丄PPF-04偺惈擻偼傑偩廫暘偱偼側偄偲峫偊偰偄傑偡丅乮傕偪傠傫丄PPF-04偼崅懍惈傪廳帇偟偰偄傞傢偗偱偼偁傝傑偣傫偑丅乯
 PPF-04偺價僨僆 PPF-04偺慁夞惈擻 廃攇悢偲懍搙偺娭學 徚旓揹椡偺應掕 [ View of Model Fish Robots ] [ Fish Robot Home Page ] [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |
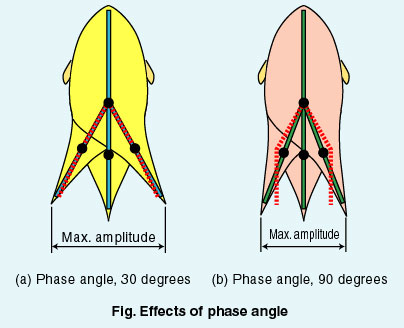 丂塃偺恾偼丄埵憡嵎傪30亱偍傛傃90亱偲偟偨応崌偺旜暱偲旜傂傟偺摦偒傪昞偟偰偄傑偡丅恾拞偺愒偺攋慄偼丄旜暱偑嵟戝怳暆乮30亱乯偲側偭偨偲偒偺娭愡偺埵抲傪帵偟偰偄傑偡丅偙偺傛偆偵丄旜傂傟屻抂晹偺嵟戝怳暆偼丄埵憡嵎偑彫偝偄傎偳憹壛偟傑偡丅PPF-04傪忋婰偺幚尡忦審偱塣摦偝偣偨応崌丄埵憡嵎傪30亱偲偟偨偲偒偺旜傂傟屻抂晹偺嵟戝怳暆偼72mm偱偁傞偺偵懳偟丄埵憡嵎傪90亱偲偟偨偲偒偼54mm偲側偭偰偄傑偡丅
丂塃偺恾偼丄埵憡嵎傪30亱偍傛傃90亱偲偟偨応崌偺旜暱偲旜傂傟偺摦偒傪昞偟偰偄傑偡丅恾拞偺愒偺攋慄偼丄旜暱偑嵟戝怳暆乮30亱乯偲側偭偨偲偒偺娭愡偺埵抲傪帵偟偰偄傑偡丅偙偺傛偆偵丄旜傂傟屻抂晹偺嵟戝怳暆偼丄埵憡嵎偑彫偝偄傎偳憹壛偟傑偡丅PPF-04傪忋婰偺幚尡忦審偱塣摦偝偣偨応崌丄埵憡嵎傪30亱偲偟偨偲偒偺旜傂傟屻抂晹偺嵟戝怳暆偼72mm偱偁傞偺偵懳偟丄埵憡嵎傪90亱偲偟偨偲偒偼54mm偲側偭偰偄傑偡丅