Underwater Robotics Research Group
UNDERWATER ROBOTICS
This group is developing AUVs (Autonomous Underwater Vehicles), ASVs (Autonomous Surface Vehicles), formation technology for multiple AUVs, and seafloor exploration technology using AUVs.
Members
(◎: Head of the Group)
- Takumi SATO
- Kanako KOBATAKE
- Toru NAKANISHI (Concurrent post)
Research Themes
Research Introduction
Marine surveys by AUVs
Seafloor topography sonar observation
Submarine caldera
In December 2016, we deployed navigational AUVs 1 and 2, Hobalin, and an offshore transponder to conduct a seafloor survey of the Omuro Hole (off Izu Oshima).
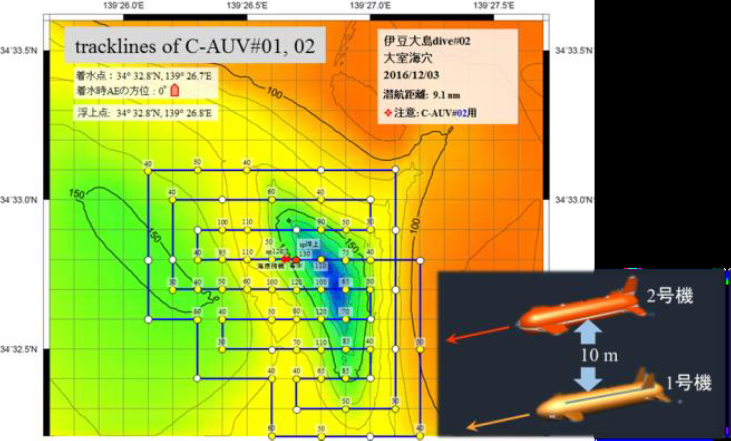
Figure1 Survey lines of AUVs No.1 and No.2
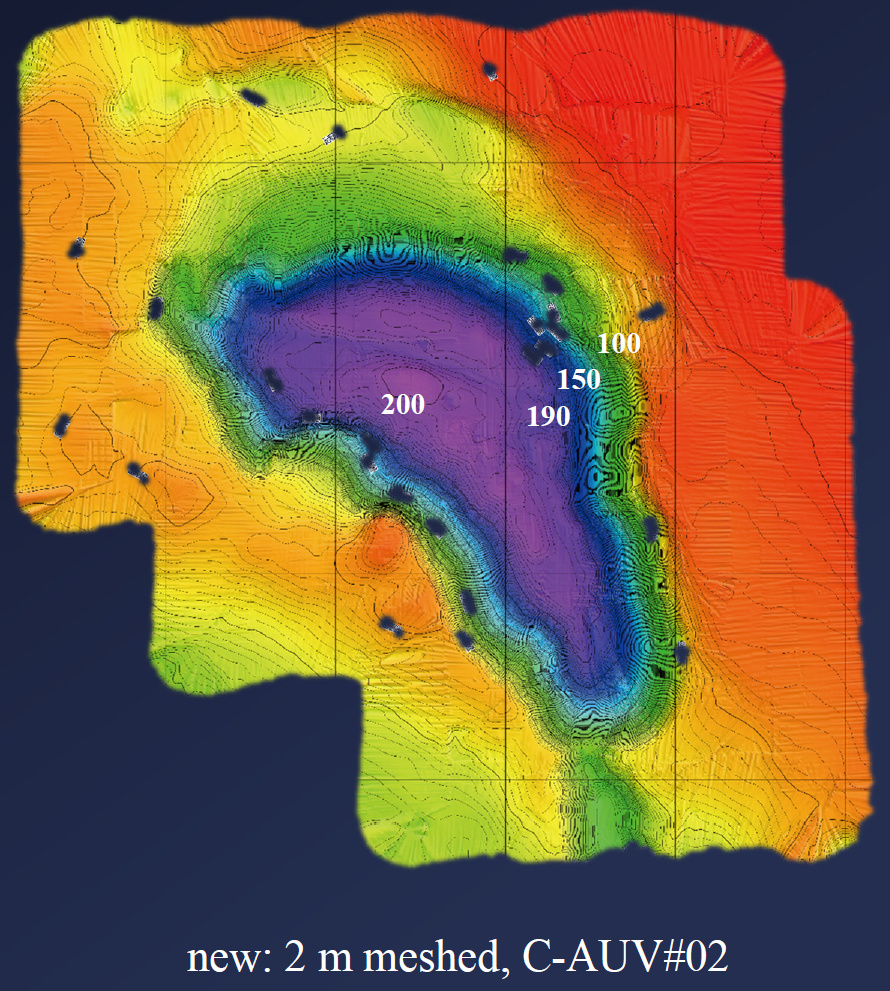
Figure2 Seafloor topography of
the Omuro Hole observed
by the navigational AUV No.2
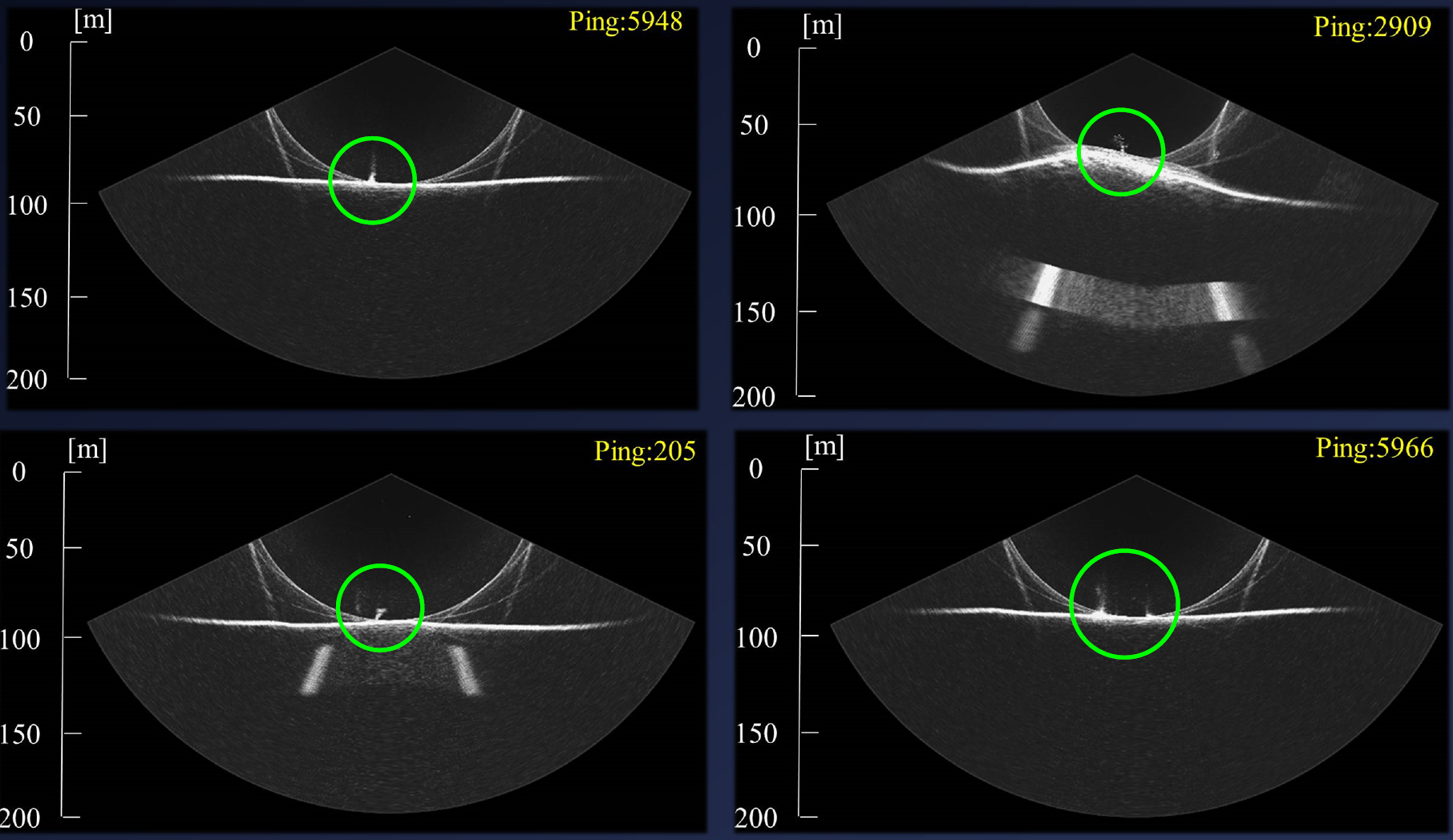
Figure3 Acoustic image of hydrothermal plume
captured by sonar at Unit 2
Electric field anomaly near hydrothermal ore deposit
Hydrothermal ore deposit (chimneys/mounds)
In October 2018, we conducted a seafloor survey in the Ogasawara Islands area and observed electric field anomalies near submarine hydrothermal deposits.
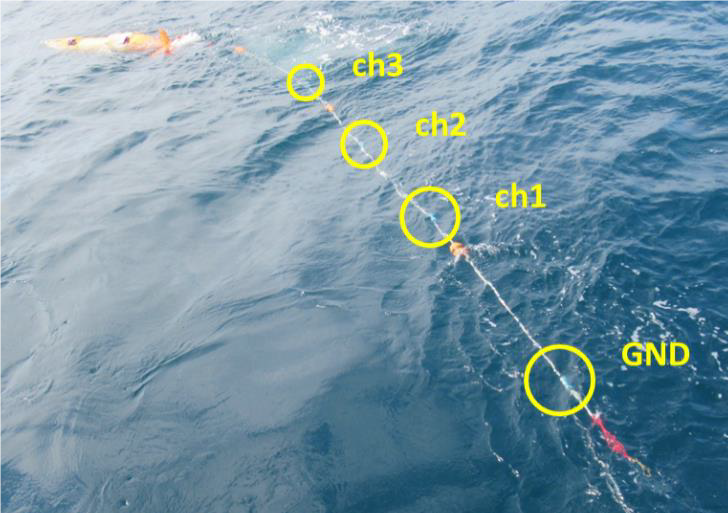
Figure4 Natural potential observation
(just before AUV diving)
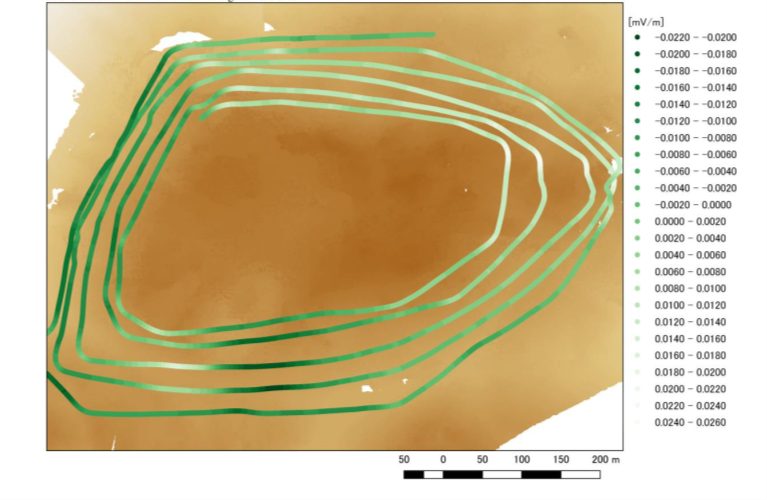
Figure5 Observation results
(AUV altitude 80 m, navigation speed 1.8 m/s)
Source: "Measurement of Potential Anomalies in Submarine Hydrothermal Deposits
Undersea video camera shooting
Hydrothermal vents (chimneys)
In October 2017, a low-altitude submarine survey of the waters west of Kumejima was conducted by the Hobalin.
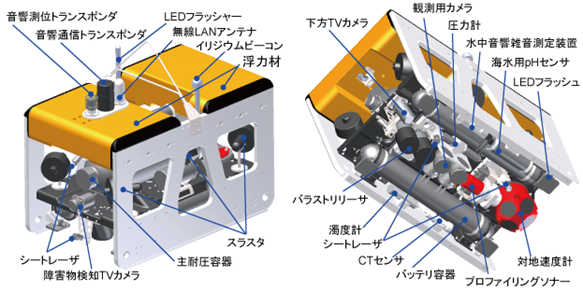
Figure6 Configuration of
the hovering AUV "Hobalin"
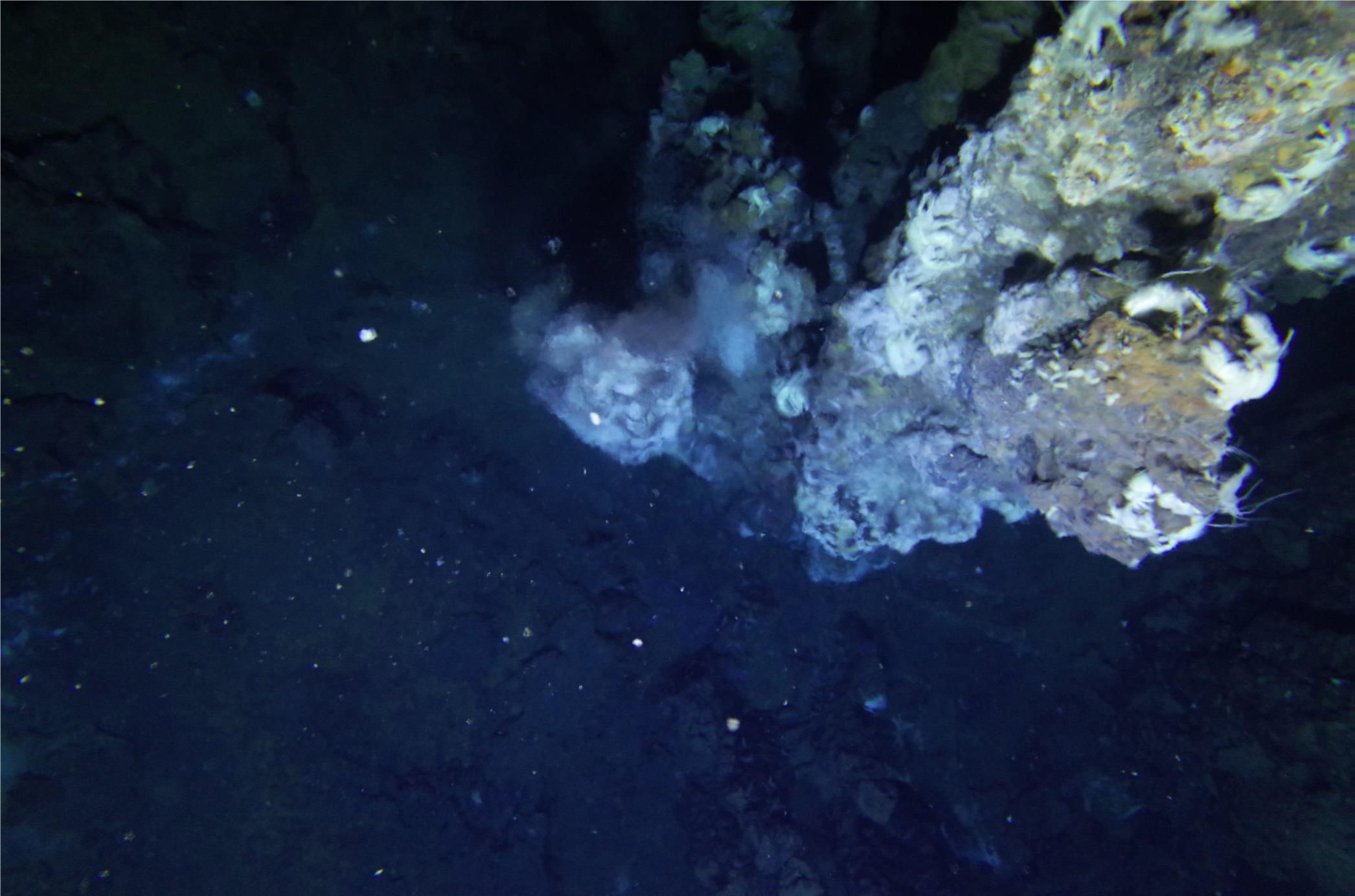
Figure7 Photography of a chimney
(submarine hydrothermal vent)
Source: "Development Status of the Hovering AUV "Hobalin""
Benthic fish
In April 2018, we conducted a submarine survey of Suruga Bay and successfully captured video images of benthic fish using a 4K video camera mounted on the "Hobalin."

Figure8 Performance verification test
in Suruga Bay
図9 Benthic fish shooting video
Source: "Development Status of the hovering AUV "Hobalin""
In May 2018, a submarine survey of the Ogasawara Islands' Sofugan was conducted and footage of killer whales filmed by Hobalin was broadcast in the NHK special "Secret Island Exploration Tokyo Lost World Vol. 2: Sofugan."
Reference Web site: "Secret Island Exploration Tokyo Lost World Vol. 2: Sofugan" (in Japanese)
Survey of lake bottom ruins
In June 2018, we surveyed a lake bottom site in Lake Biwa (the Tsuzura Ozaki Lake Bottom Site) and confirmed the location of a jar approximately 1,000 years old.
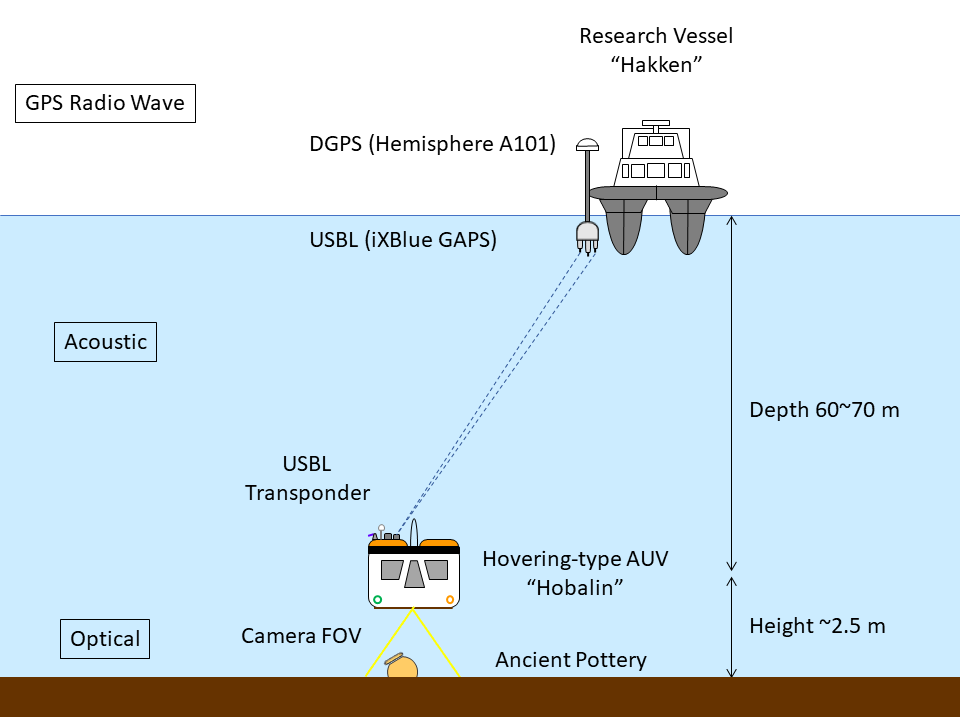
Figure10 Survey of
Lake Bottom Archaeological Sites
(Confirmation of Lake Bottom Location)
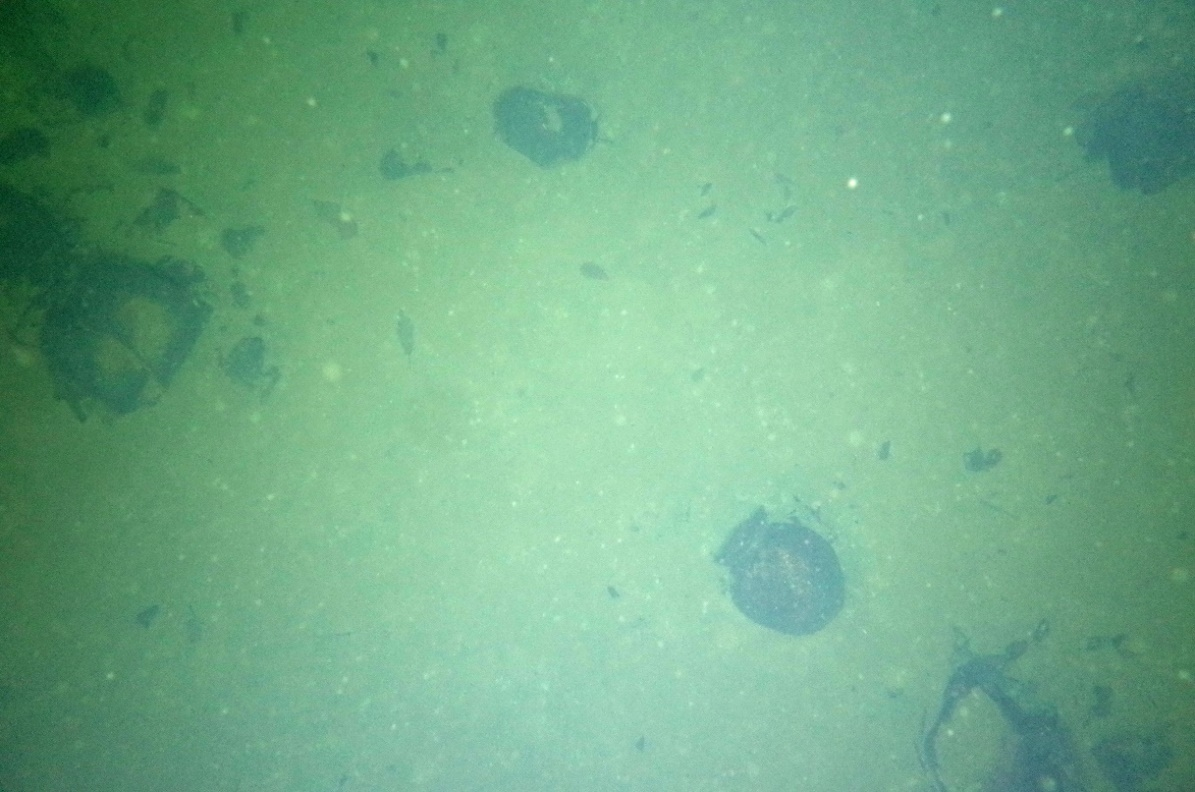
Figure11 Ancient jar from
the Tsuzura Ozaki Lake Bottom Site
Offshore wind power generation facilities
In November 2018 and September 2019, we conducted demonstration tests of inspection work at offshore wind power generation facilities off the coast of Choshi by "Hobalin."
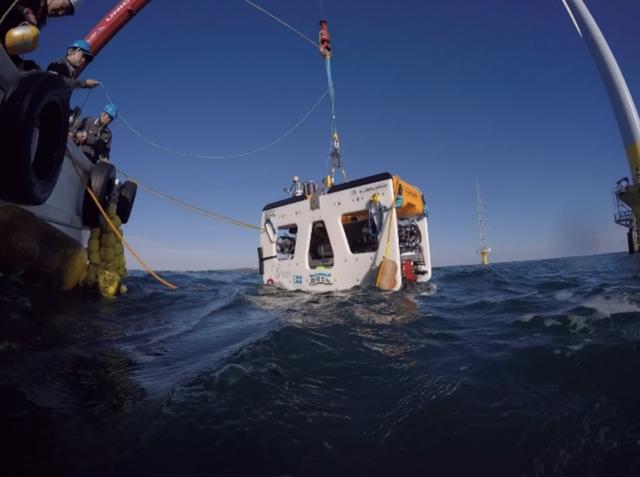
Figure12 R & D of inspection methods for offshore wind power facilities using AUVs
Submarine fumaroles (CO2 seeps)
In October 2020, the "Hobalin" submersible was tested for CO2 seeps (areas of carbon dioxide seafloor plumes) in Mikama Bay, Shikinejima.
Technical Development of AUVs
AUV specification table
This group owns one ASV as an offshore transponder, four navigational AUVs and two hovering AUVs for the deep-sea floor (<2,000 m) surveys, one mini-AUV and one small ROV for the shallow-sea floor (<100 m) surveys, and conducts R & D and marine research.
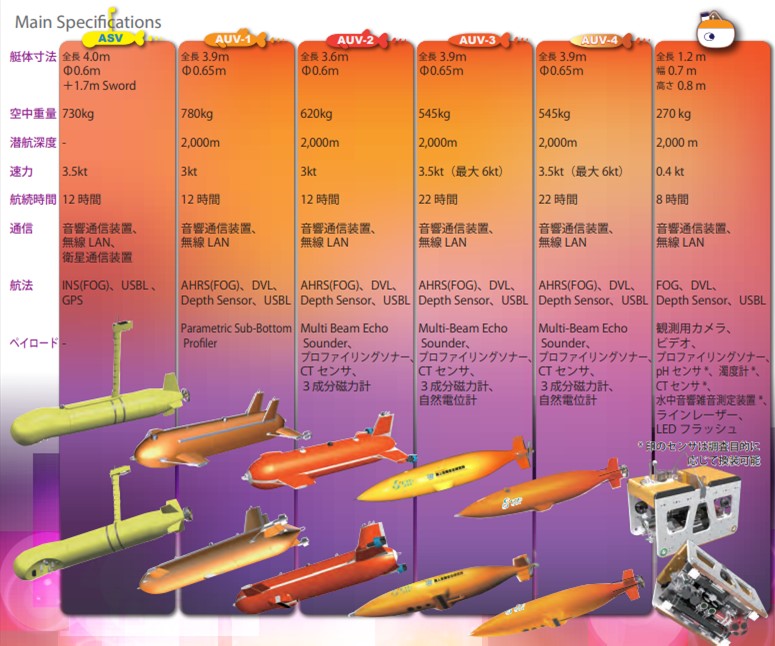
Figure13 AUV & ASV Specifications
Multiple AUV formation navigation --- Basic formation control (1ASV-5AUVs)
We are developing a technology that allows multiple AUVs to simultaneously dive and form up on the deep sea floor for efficient sonar observation of the seafloor topography.
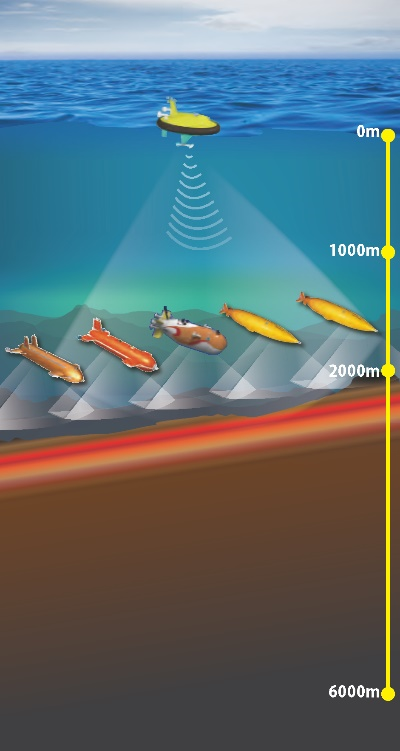
Figure14 Concept of deep-sea floor AUV formation control
AUV control software --- ROS-based software development
We are developing software for multiple AUVs and underwater acoustic communication and positioning using ROS (Robot Operating System) We will provide this software to the private sector as AUV control software.
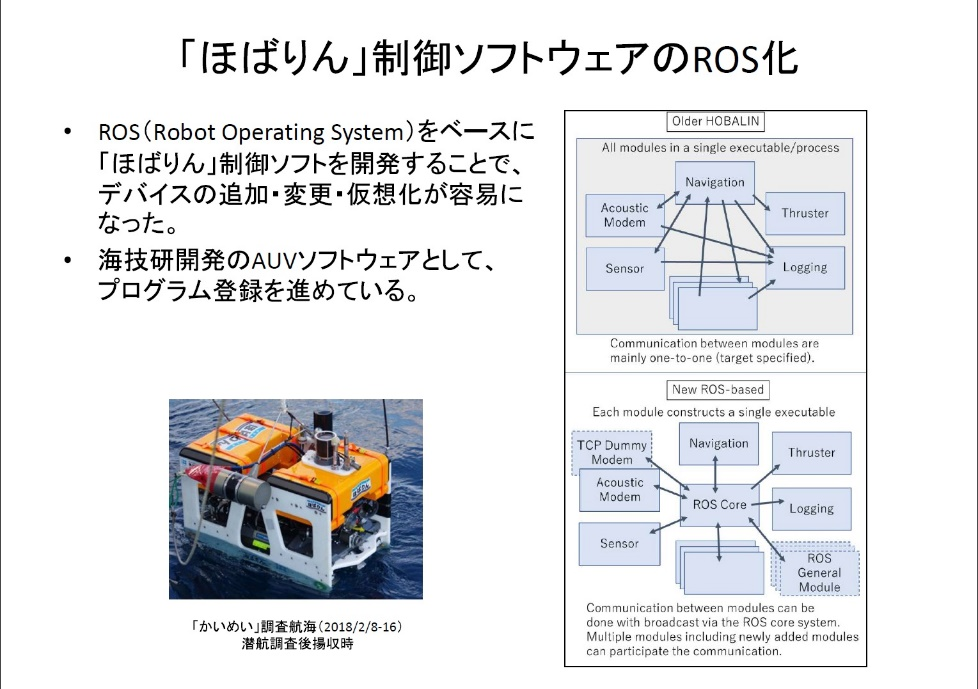
Figure15 "Conversion of
HOBALIN control software to ROS"
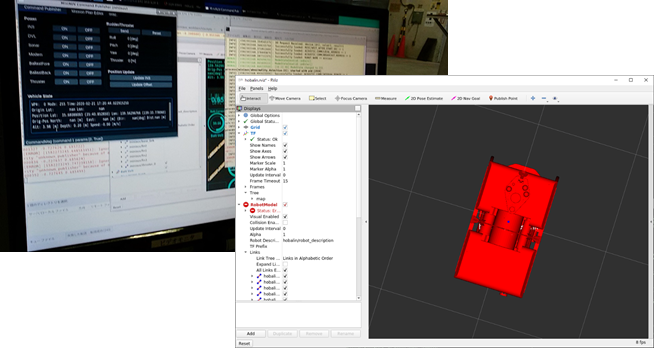
Figure16 Software
under development screen
Source: Development status of the hovering AUV "Hobalin"
AUV tank tests
We test AUVs, underwater sensors, etc. in the test tank at NMRI.
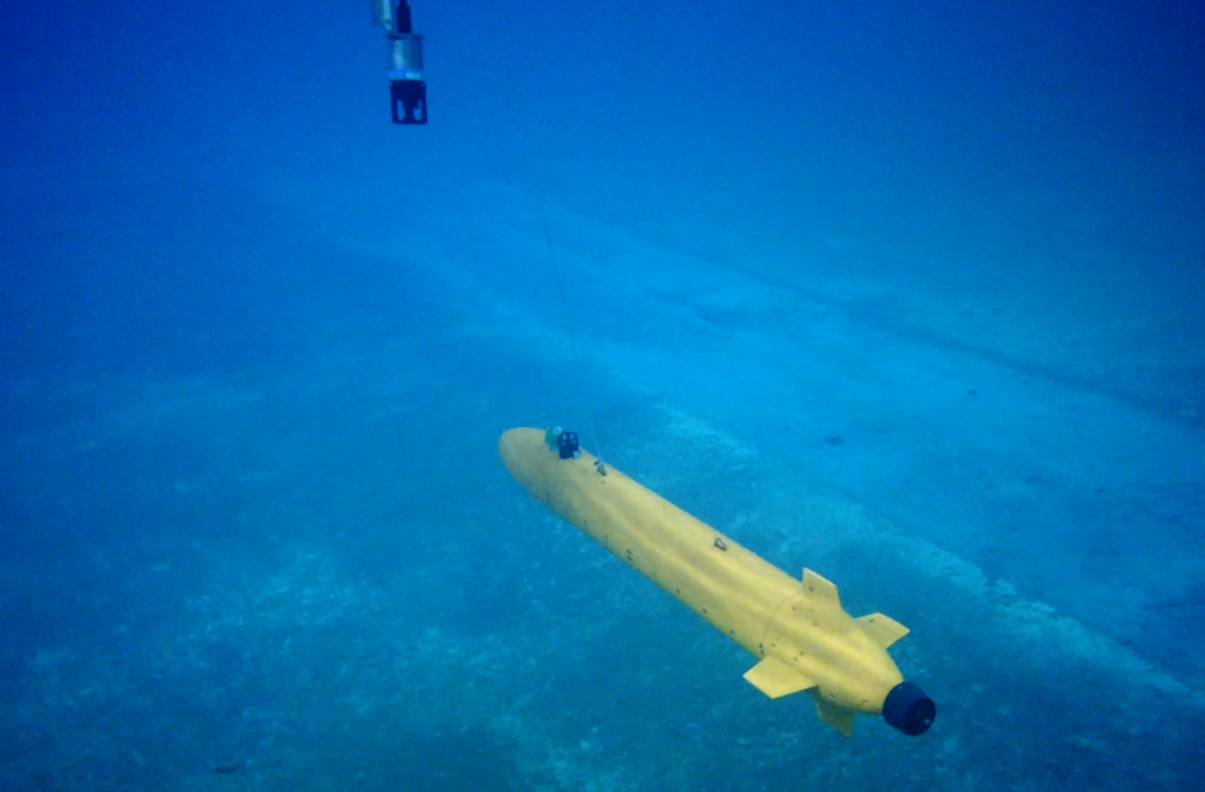
Figure17 mini-AUV
Related Links
SIP Innovative Deep-sea Resource Investigation Technology
 海洋研究開発機構 SIP革新的深海資源調査技術 ビデオギャラリー [テーマ2-1]
海洋研究開発機構 SIP革新的深海資源調査技術 ビデオギャラリー [テーマ2-1]