水中ロボティクス研究グループ
UNDERWATER ROBOTICS RESEARCH GROUP
当研究グループでは、AUV(Autonomous Underwater Vehicle, 自律型水中航行ロボット)の開発、ASV(Autonomous Surface Vehicle, 自律型水面航行ロボット)の開発、複数AUVの隊列技術、AUVを用いた海底探査技術の研究等を進めています。
研究テーマ紹介
研究紹介
AUVによる海洋調査
海底地形ソナー観測
海底カルデラ
2016年12月、航行型AUV 1, 2号機、ほばりん及び洋上中継器を投入し、大室海穴(伊豆大島沖)の海底調査を行いました。
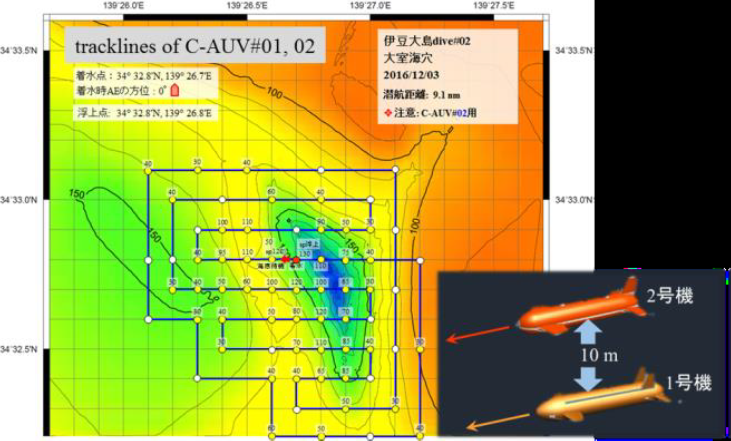
図1 航行型AUV 1, 2号機の測線
出典:「次世代海洋調査の新戦略: 複数AUV同時展開による高効率・高精度な海洋調査の実現に向けて」
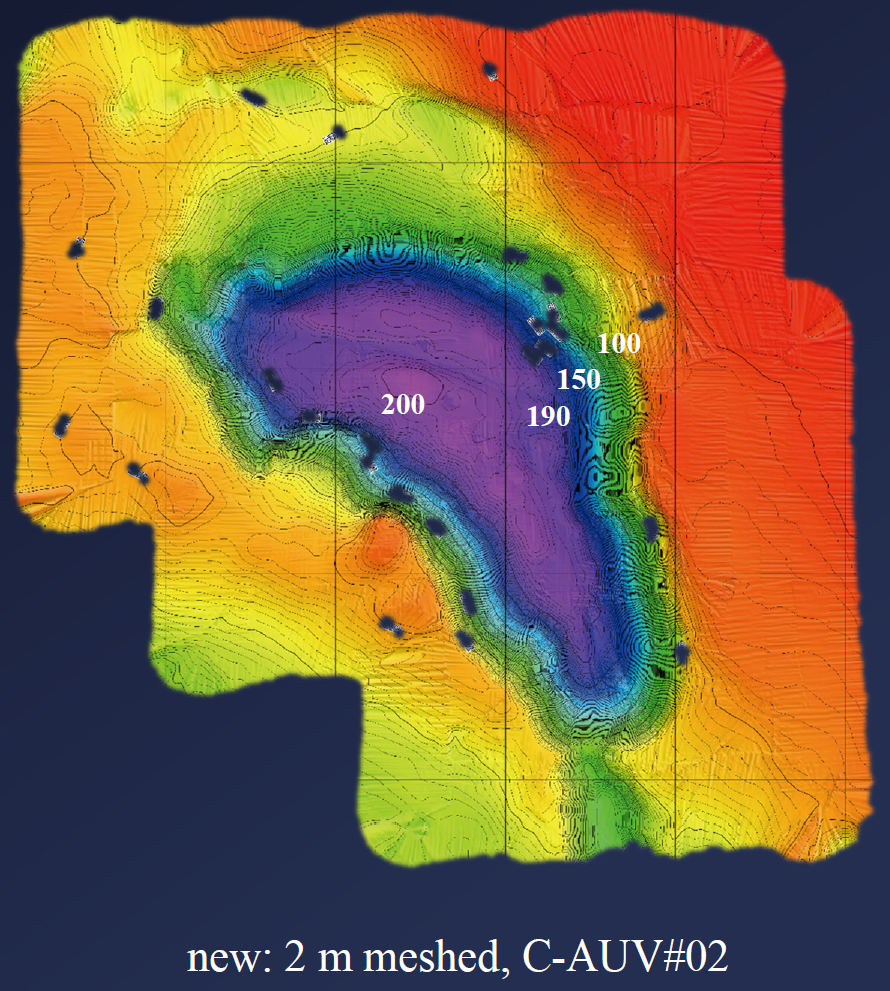
図2 航行型AUV 2号機が観測した
大室海穴の海底地形
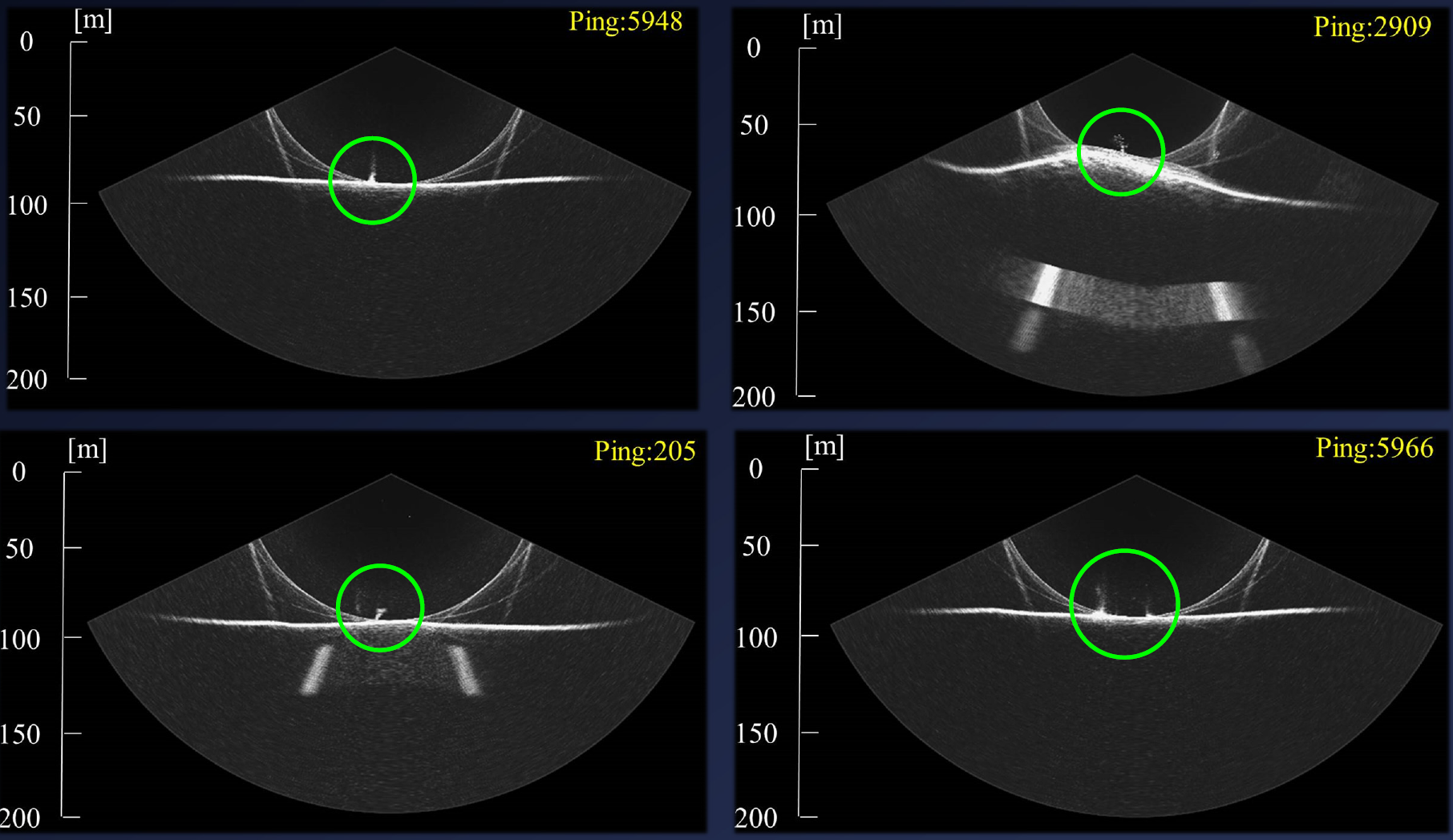
図3 2号機のソナーが捉えた熱水プルームの音響画像
熱水鉱床付近の電場異常
熱水鉱床(チムニー/マウンド)
2018 年10 月、小笠原諸島海域の海底調査を行い、海底熱水鉱床付近の電場異常を観測しました。
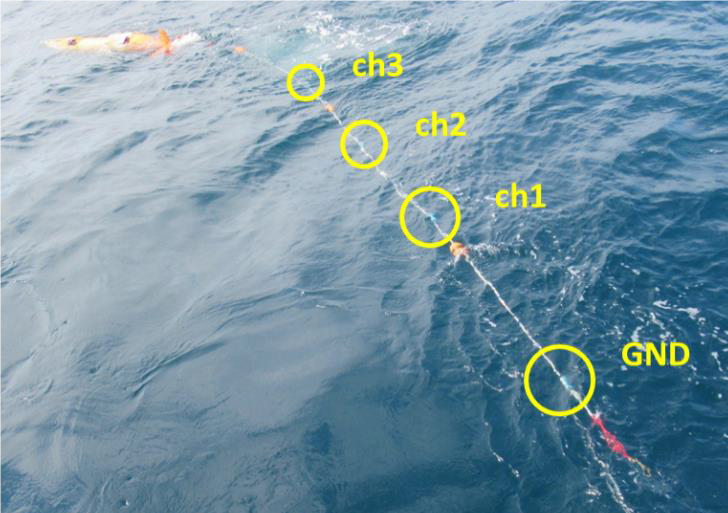
図4 自然電位観測(AUV潜航直前)の様子
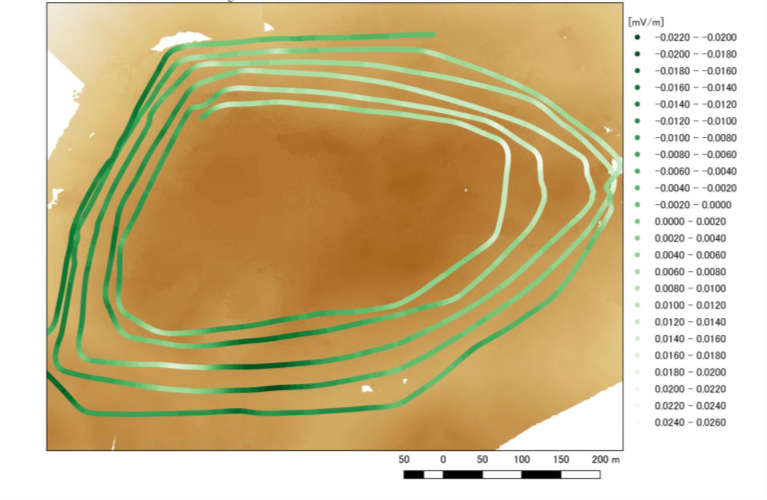
図5 観測結果
(AUV高度 80 m、航行速度 1.8 m/s)
海底映像カメラ撮影
熱水噴出孔(チムニー)
2017年10月、「ほばりん」による久米島西方海域の低高度潜航調査を行いました。
海底から高度3mを保ち、水温観測や海底熱水鉱床の写真調査に成功しました。
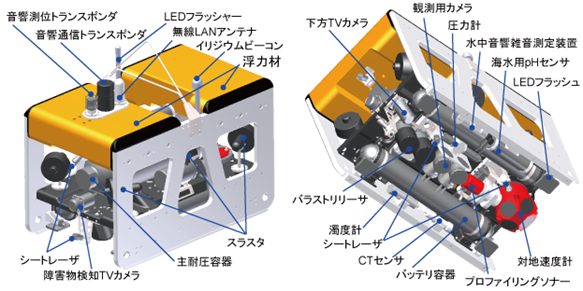
図6 ホバリング型AUV「ほばりん」の構成
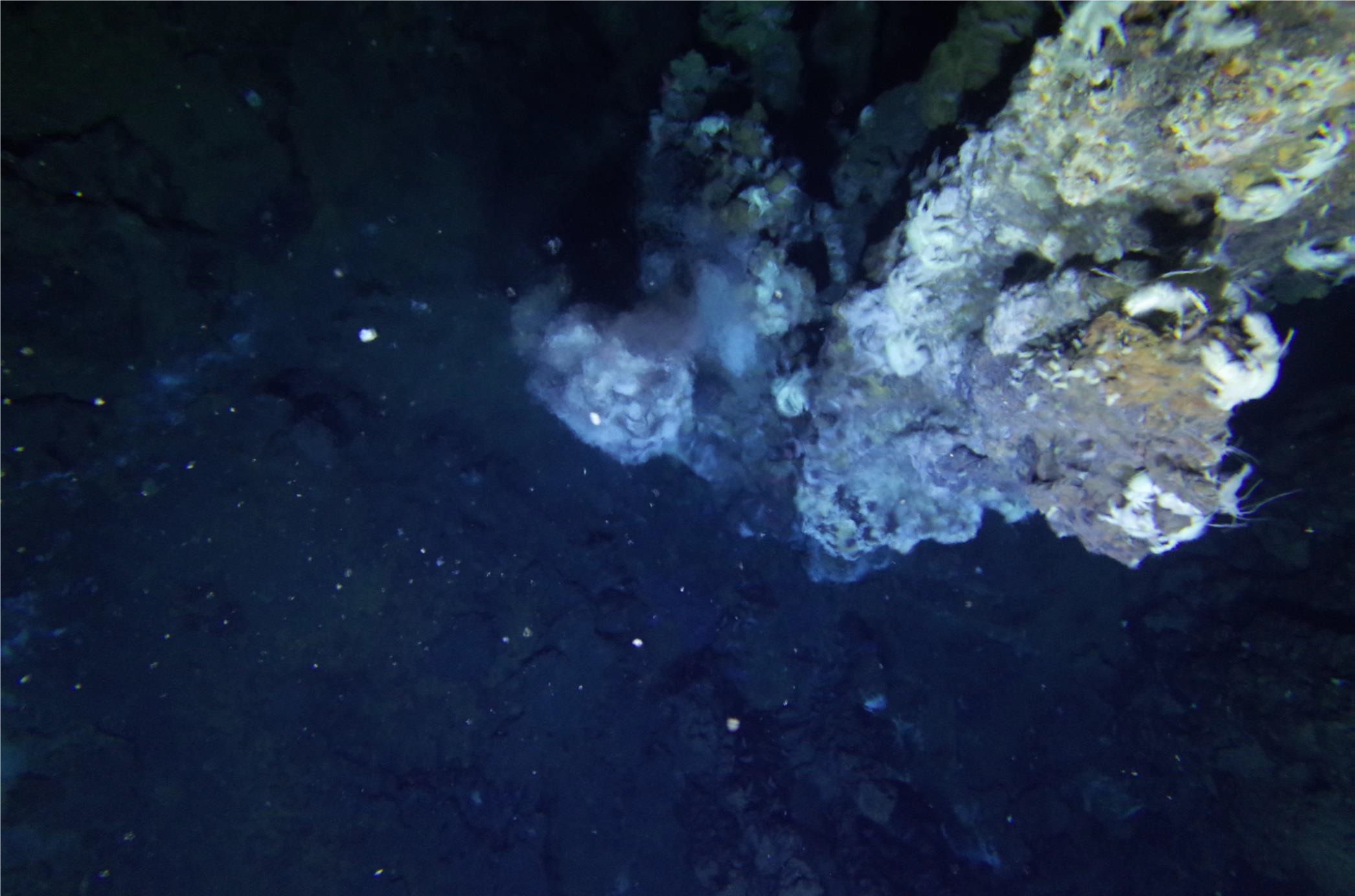
図7 チムニー(海底熱水噴出孔)の写真撮影
底生魚
2018年4月、駿河湾の潜航調査を行い、「ほばりん」に搭載した4Kビデオカメラで底生魚の動画撮影に成功しました。

図8 駿河湾での性能確認試験
図9 底生魚撮影動画
2018年5月、小笠原諸島孀婦岩の潜航調査を行い、「ほばりん」が撮影したシャチブリの映像が、NHKスペシャル「秘島探検東京ロストワールド第2集 孀婦(そうふ)岩」で放送されました。
参考Webサイト:「秘島探検東京ロストワールド第2集 孀婦(そうふ)岩」
湖底遺跡調査
2018年6月、琵琶湖の湖底遺跡(葛籠尾崎湖底遺跡)の調査を行い、約千年前の壺の位置を確認しました。
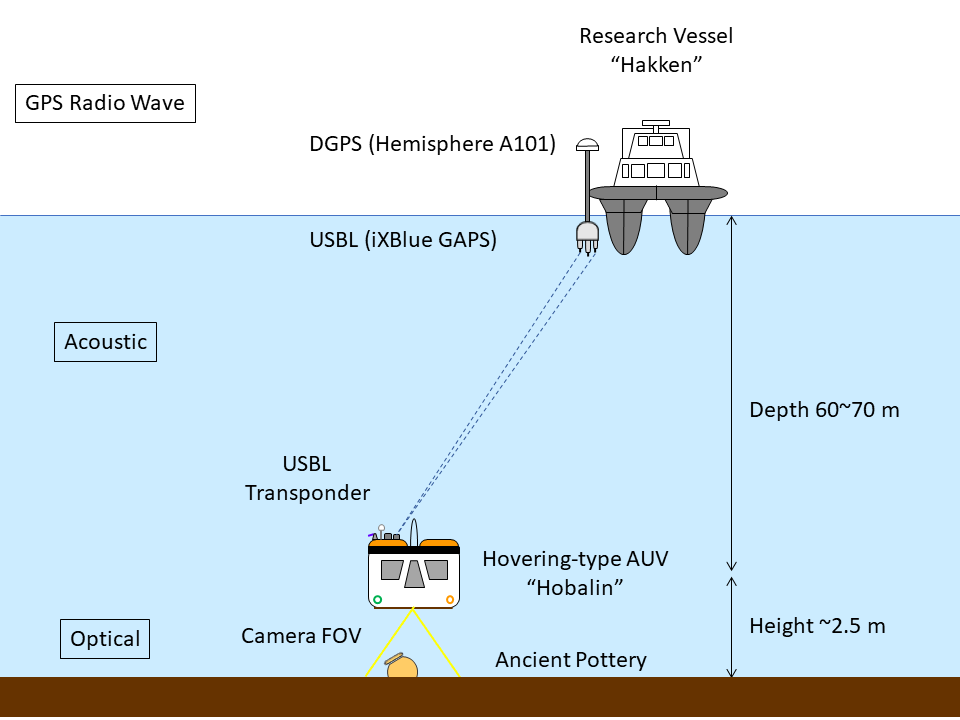
図10 湖底遺跡調査(湖底位置確認)の概要
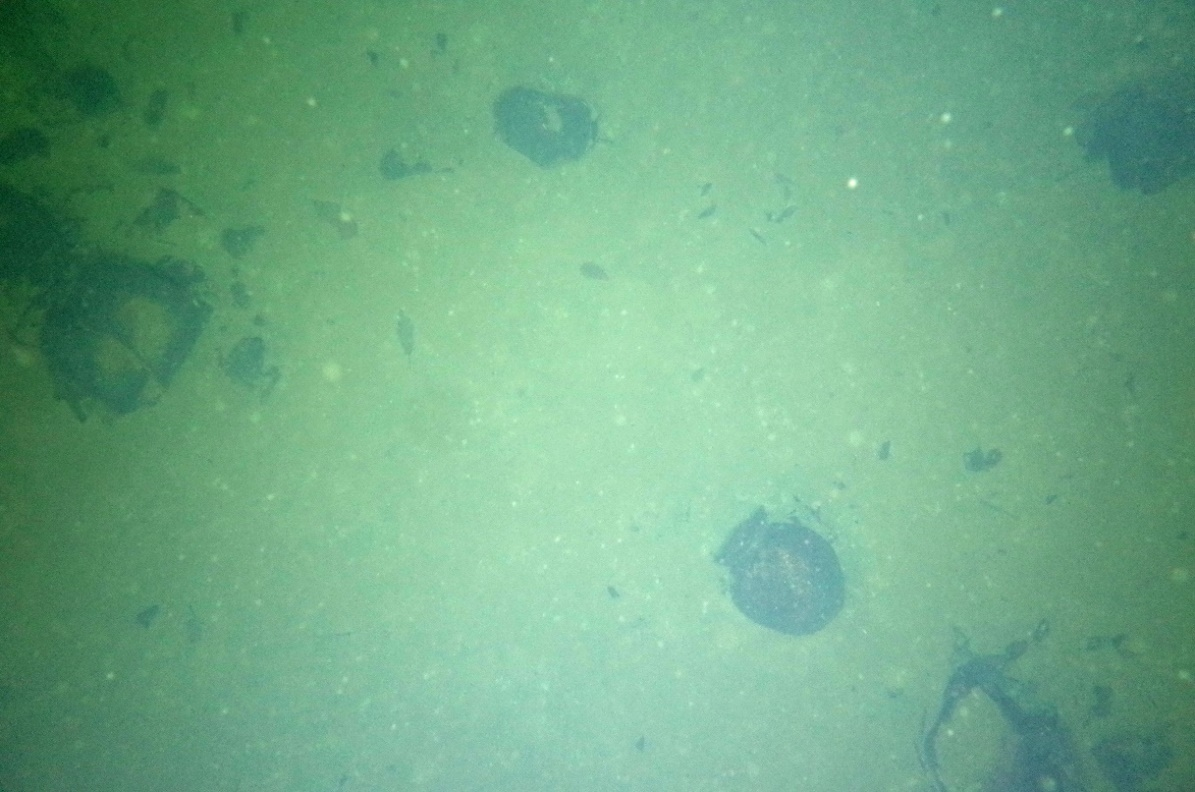
図11 葛籠尾崎湖底遺跡の古代壺
洋上風力発電施設
2018年11月と2019年9月、「ほばりん」による銚子沖洋上風力発電施設の点検作業の実証実験を行いました。
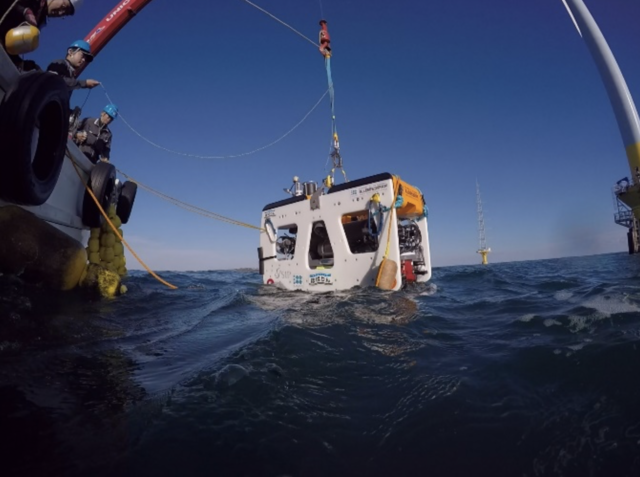
図12 AUVを用いた洋上風力発電施設の検査法の研究開発
海底気泡(CO2シープ)
2020年10月、式根島御釜湾のCO2シープ(二酸化炭素の海底噴出域)について、「ほばりん」潜航試験を行いました。
AUVの技術開発
AUVスペック表
水中ロボティクス研究グループでは、洋上中継機としてASV 1機、深海底(<2,000 m)調査用として航行型AUV 4機およびホバリング型AUV 2機、浅海底(<100 m)調査用としてmini-AUV 1機および小型ROV 1機を所有し、研究開発と海洋調査を行っています。
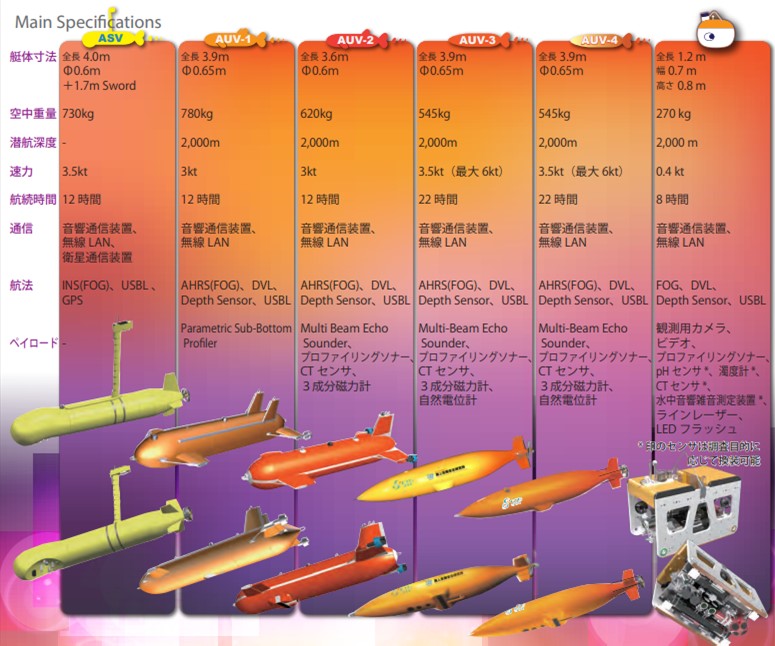
図13 AUV & ASV Specifications
複数AUV制御---基本隊列制御(1ASV-5AUVs)
複数のAUVを同時に潜航、深海底で隊列させ、海底地形を効率よくソナー観測する技術を開発しています。
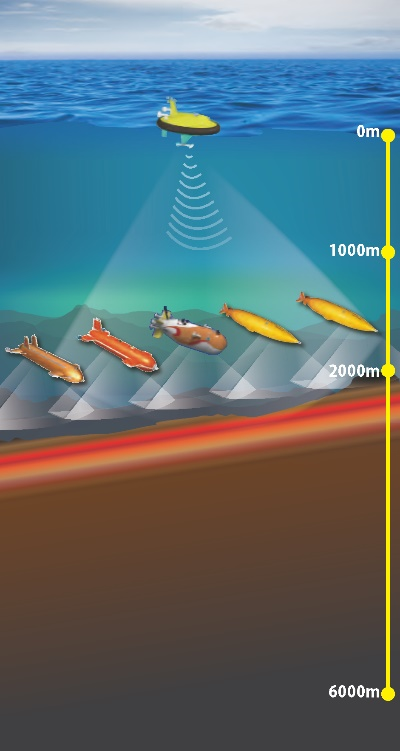
図14 深海底AUV隊列制御の構想
AUV制御ソフト開発(ROSベース制御ソフトウェア)
ROS(Robot Operating System)を利用して、複数AUVや水中音響通信・測位に対応したソフトウェアを開発しています。AUV制御ソフトウェアとして民間への提供も行います。
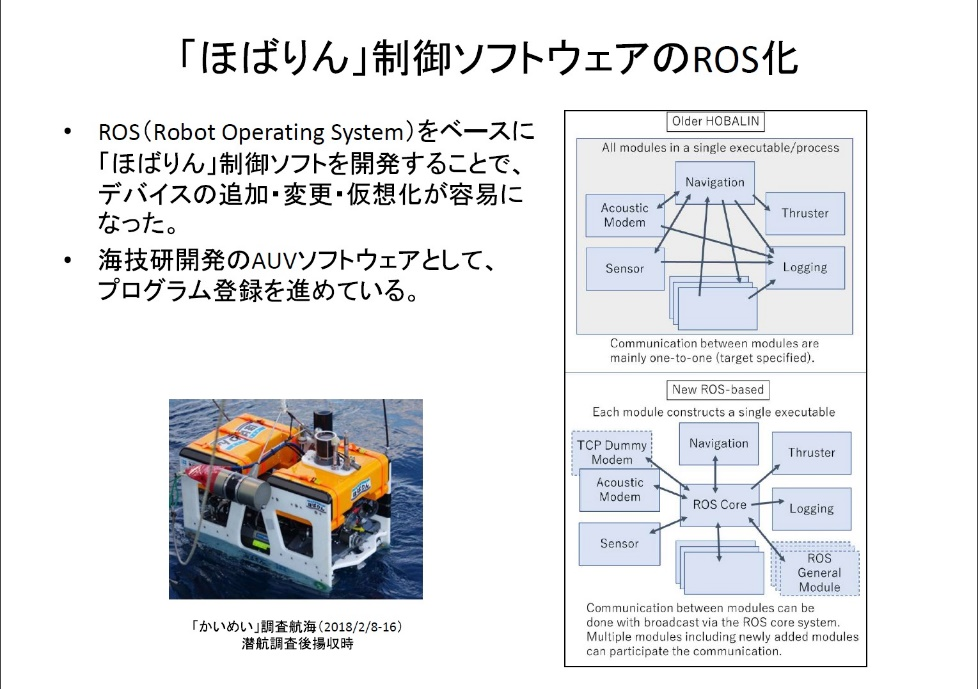
図15 「ほばりん制御ソフトウェアのROS化」
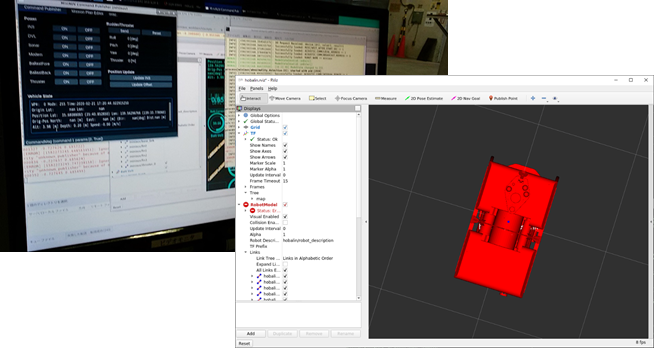
図16 開発中のソフトウェア画面
AUV水槽試験
所内の試験水槽でAUVや水中センサー等の試験を行っています。
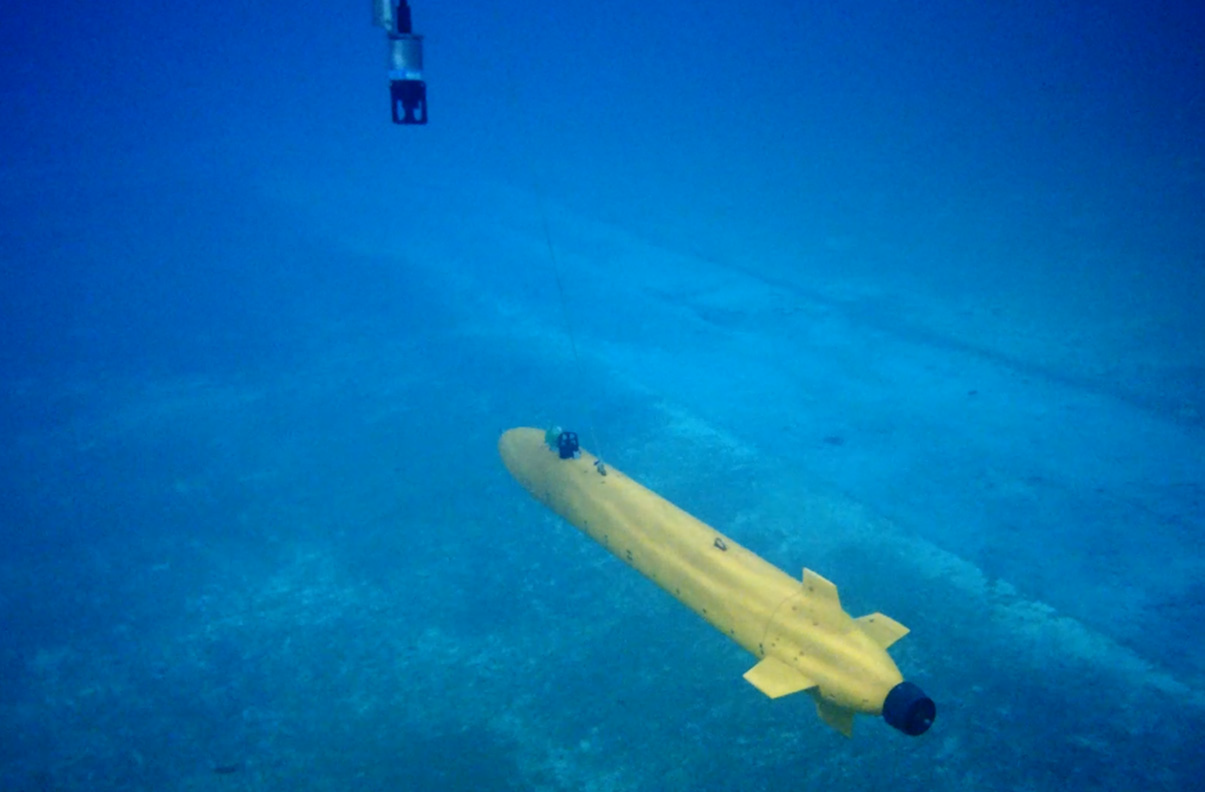
図17 mini-AUV
 海洋研究開発機構 SIP革新的深海資源調査技術 ビデオギャラリー [テーマ2-1]
海洋研究開発機構 SIP革新的深海資源調査技術 ビデオギャラリー [テーマ2-1]