Evaluation of Maneuvering Hydrodynamic Forces for Estimating Slewing Motion during Tandem Offloading at Low-speeds and Large Drift Angles
Research Overview
Research Overview
In offshore oil and gas field production, the tandem method is one methodology for the hydrocarbon offloading from FPSOs (※1) or FLNGs (※2). In this method, fluctuations in hawser tension resulting from the swinging motion of shuttle tankers significantly affect the operability of the offloading process. By accurately estimating the slewing motion of the shuttle tanker, it becomes possible to develop operational plans for controlling the slewing motion and to evaluate the operability of the offloading process.
During offloading, the swinging motion occurs under combined external forces such as wind, waves, and currents while the shuttle tanker is connected to the FPSO or FLNG. This motion is characterized by large drift angles at low speeds, where lateral flow predominates. According to the MMG model (※3), the external forces in the equations of motion can be separated as follows:
$$
\begin{equation}
\left .
\begin{array}{lllllll}
X & = X_H & +X_P & +X_R & +X_A & +X_W & +X_T\\
Y & = Y_H && +Y_R & +Y_A & +Y_W & +Y_T\\
N & = N_H && +N_R & +N_A & +N_W & +N_T
\end{array}
\quad \right \}
\end{equation}
$$
where $X$, $Y$, and $N$ are the external forces in the longitudinal and lateral directions, and the yaw moment respectively. The subscripts $H$, $P$, $R$, $A$, $W$, and $T$ indicate maneuvering hydrodynamic forces, propeller thrust, rudder force, wind pressure, wave drift force, hawser tension.
Conventional estimation formulas for maneuvering hydrodynamic forces assume normal navigation and cannot be directly applied to low speed and large drift angle conditions. The Offshore Engineering System Research Group evaluates the maneuvering hydrodynamic forces through model tests.
Model Tests
Based on Takashina’s article (※4), we conducted pivot-turning, oblique towing, and yaw-rotating tests to obtain data at low speeds and large drift angles to evaluate maneuvering hydrodynamic forces. In these model tests, a scale model ship was constrained using a towing device installed on a turntable of the towing carriage in the Ocean Engineering Basin (Figure 1). By towing the model ship (Figure 2), the forces that the model ship receives from the fluid are measured.
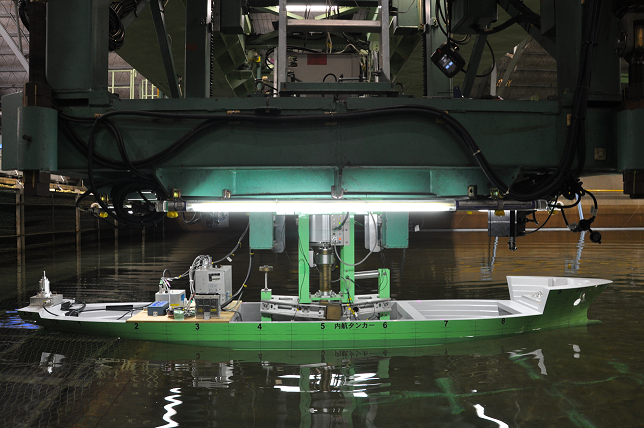
Figure 1 Test setup

Figure 2 outline of the model tests($U$: ship speed, $r$: yaw rate, $beta$: drifting angle)
In the pivot-turning test, by measuring and analyzing the hydrodynamic forces when the ship speed $U$ was zero, we obtained the maneuvering derivatives to express the maneuvering hydrodynamic force related to the yaw moment at $U=0$ m/s. In the oblique towing test, by measuring and analyzing the hydrodynamic forces when the model ship is towed straight with a certain drifting angle $β$, we could obtain the maneuvering derivatives for each direction (surge, sway, and yaw) at $r=0$ In the yaw-rotating test, we measured and analyzed the hydrodynamic forces while towing the model ship at a constant speed $U$ with a constant yaw rate $r$, determining maneuvering derivatives in each direction under conditions where $U\ne0$ m/s and $r\ne0$ deg/s. We evaluated the maneuvering hydrodynamic forces using these data with appropriate expressions suited for low speed and large drift angle conditions.

Figure 3 Example of pivot-turning test results (yaw moment)

Figure 4 Example of oblique towing test results (nondimensional surge force represented by Fourier coefficients of the 1st to 5th orders)

Figure 5 Example of yaw-rotating test results (nondimensional yaw moment expressed by 5th-order Fourier coefficients)
Acknowledgments
This research was conducted as part of the “Survey Project for Establishment of Risk Assessment System for Dragging Anchors” commissioned by the Maritime Bureau of the Ministry of Land, Infrastructure, Transport and Tourism. We deeply appreciate the cooperation of all parties involved.
Reference
- 1. Hasegawa, K., Ishida, K., and Yukawa, K.: Hydrodynamic Forces Acting on Hull, Rudder, and Propeller of Coasting Vessels in Low-speed Conditions, Papers of National Maritime Research Institute, Vol.22, No.4, pp.1-22, 2023 (in Japanese).
Footnotes
- FPSO:Floating Production Storage and Offloading System
- FLNG:Floating Liquefied Natural Gas production system
- MMG model:Mathematical Modeling Group of maneuvering motion model
- Takashina, J.: Ship Maneuvering Motion due to Tugboats and Its Mathematical Model, Journal of the Society of Naval Architects of Japan, Issue 160, pp.93-102, 1986 (in Japanese).