PPF-04の旋回性能
 魚ロボットを旋回させるには、
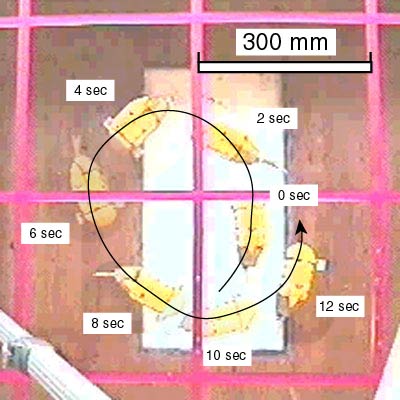
魚ロボットを旋回させるには、(1) 胸ひれや腹ひれなどを利用する方法 (2) 尾の運動を左右どちらかに偏らせる方法 (3) 左右への尾の運動速度を変化させる方法 など、様々な方法が考えられます。手始めとして、以下の実験結果では(2)の方法を採用しました。 左の写真は、PPF-04を360°旋回させたときの合成写真です。尾ひれと尾柄との位相差は90°、周波数は約3Hz、尾ひれと尾柄は中心軸から左側に40°から10°までの範囲で往復運動させています。この結果から、半径約150mm程度で旋回していることがわかります。 なお、運動制御プログラムが完全ではないため、右側への旋回半径は、左側よりもやや大きくなっています。
 PPF-04のビデオ 周波数と速度の関係 位相差と速度の関係 消費電力の測定 [ View of Model Fish Robots ] [ Fish Robot Home Page ] [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |