徚旓揹椡偺應掕
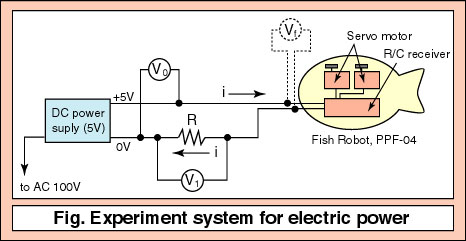
徚旓揹椡偺應掕曽朄丂PPF-04偵偍偗傞徚旓揹椡偺應掕僔僗僥儉傪壓偺恾偵帵偟傑偡丅揹尮乮揹埑V0乯偲嫑儘儃僢僩撪偺R/C庴怣婡偍傛傃僒乕儃儌乕僞偲偺娫偵掞峈R乮R=0.67兌丄4兌偺掞峈6杮傪暲楍偵攝抲乯傪庢傝晅偗傑偡丅掞峈椉抂偺揹埑傪V1偲偡傞偲丄掞峈R撪偺揹棳i偼i=V1/R 偲側傝傑偡丅嫑儘儃僢僩撪偺庴怣婡偵偐偐傞揹埑Vf偼丄 Vf=V0-V1 偱偁傝丄傑偨丄掞峈R撪偺揹棳i偲嫑儘儃僢僩撪傪棳傟傞揹棳i偲偼摍偟偄偺偱丄嫑儘儃僢僩偺徚旓揹椡We(W)偼丄 We=Vfi=(V0-V1)V1/R 偲側傝傑偡丅偡側傢偪丄V0偲V1傪應掕偡傞偙偲偱丄徚旓揹椡We傪媮傔傞偙偲偑偱偒傑偡丅崱夞偺幚尡偱偼丄揹尮傪埨掕偝偣傞偨傔偵丄嫑儘儃僢僩撪偺僶僢僥儕乮7.2V丄110mAh乯傪梡偄偢偵捈棳揹尮乮COSEL惢R25-5丄5V5A丄擖椡AC85-132V乯傪巊梡偟傑偟偨丅傑偨丄僒乕儃儌乕僞偺塣摦偵傛偭偰揹埑Vf偍傛傃揹棳i偼曄摦偡傞偨傔丄A/D僐儞僶乕僞偵傛傝1kHz偺僒儞僾儕儞僌廃攇悢偱1000屄偺僨乕僞乮1sec乯傪庢摼偟丄偦傟傜偺暯嬒偐傜徚旓揹椡We傪媮傔傑偟偨丅徻嵶側應掕偱偼丄塣揮廃攇悢偵傛偭偰僒儞僾儕儞僌帪娫傪揔愗偵曄壔偝偣側偗傟偽側傝傑偣傫丅
廃攇悢偲徚旓揹椡偺娭學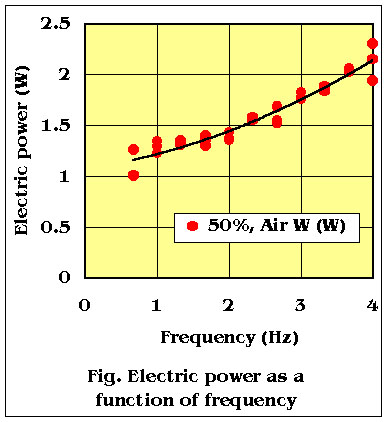 丂塃偺恾偼丄PPF-04傪悈忋偵弌偟偨忬懺偱丄旜傂傟偲旜暱偲偺埵憡嵎傪90亱丄拞怱幉偐傜嵍塃偵嵟戝20亱偢偮塣摦偝偣偨応崌偺塣揮廃攇悢偲徚旓揹椡偲偺娭學偱偡丅偙偺寢壥偐傜丄廃攇悢偑憹壛偡傞偵廬偭偰丄徚旓揹椡偑忋徃偟偰偄傞偙偲偑傢偐傝傑偡丅
丂塃偺恾偼丄PPF-04傪悈忋偵弌偟偨忬懺偱丄旜傂傟偲旜暱偲偺埵憡嵎傪90亱丄拞怱幉偐傜嵍塃偵嵟戝20亱偢偮塣摦偝偣偨応崌偺塣揮廃攇悢偲徚旓揹椡偲偺娭學偱偡丅偙偺寢壥偐傜丄廃攇悢偑憹壛偡傞偵廬偭偰丄徚旓揹椡偑忋徃偟偰偄傞偙偲偑傢偐傝傑偡丅丂傑偨丄R/C憲怣婡偲庴怣婡偺揹尮傪ON偵偟丄僒乕儃儌乕僞傪惷巭偝偣偨忬懺偱偺徚旓揹椡偼丄1.32W乮5夞偺應掕偺暯嬒抣乯偱偟偨丅偙偺抣偼揹攇傪庴怣偡傞偨傔偺揹椡偱偁傞偲峫偊傜傟傑偡偺偱丄廃攇悢偑1Hz埲壓掱搙偺掅偄廃攇悢偱塣摦偝偣偨応崌丄僒乕儃儌乕僞傪摦偐偡偨傔偺揹椡偼旕忢偵彫偝偄偙偲偑傢偐傝傑偡丅側偍丄憲怣婡偺揹尮傪OFF偲偟偨忬懺偱偺徚旓揹椡偼傢偢偐0.18W偱偟偨丅憲怣婡偑ON偺帪偲OFF偺帪偺徚旓揹椡偺嵎偼旕忢偵戝偒偄偺偱偡偑丄偦偺尨場偼憲怣婡懁偱敪惗偡傞傢偢偐側僲僀僘偺偨傔偱偁傞偲峫偊傜傟傑偡丅
僐儊儞僩丂埲忋偺曽朄偱徚旓揹椡傪奣偹應掕偱偒傞偙偲偑妋擣偱偒傑偟偨丅偟偐偟丄徻嵶側幚尡偱偼丄傛傝惛搙偺崅偄應掕傪偟側偗傟偽側傜側偄偲峫偊偰偄傑偡丅
 PPF-04偺價僨僆 PPF-04偺慁夞惈擻 廃攇悢偲懍搙偺娭學 埵憡嵎偲懍搙偺娭學 [ View of Model Fish Robots ] [ Fish Robot Home Page ] [ Power and Energy Engineering Division ] [ Hirata HOME ] [ NMRI HOME ] |
| Contact khirata@nmri.go.jp |
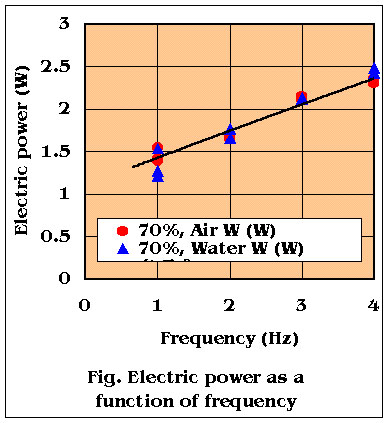 丂塃偺恾偼丄PPF-04傪悈忋偵弌偟偨忬懺偲悈拞偵擖傟偨忬懺偺塣揮廃攇悢偲徚旓揹椡偲偺娭學偱偡丅旜傂傟偲旜暱偲偺埵憡嵎偼90亱丄拞怱幉偐傜嵍塃偵嵟戝30亱偢偮塣摦偝偣偰偄傑偡丅偙偺寢壥偐傜丄悈忋乮嬻婥拞乯偲悈拞偲偱偼丄傎偲傫偳徚旓揹椡偵曄壔偑側偄偙偲偑傢偐傝傑偡丅悈拞偱偺徚旓揹椡偲悈忋偱偺徚旓揹椡偲偺嵎偼丄悈傪悇偡偨傔偵梫偟偨摦椡偱偁傞偲峫偊傜傟傑偡偑丄偦偺摦椡偼旕忢偵彫偝偄偺偱丄應掕偑偱偒傑偣傫丅怳暆傪20亱偍傛傃40亱偲偟偨応崌傕摨條偺寢壥偑摼傜傟偰偄傑偡丅
丂塃偺恾偼丄PPF-04傪悈忋偵弌偟偨忬懺偲悈拞偵擖傟偨忬懺偺塣揮廃攇悢偲徚旓揹椡偲偺娭學偱偡丅旜傂傟偲旜暱偲偺埵憡嵎偼90亱丄拞怱幉偐傜嵍塃偵嵟戝30亱偢偮塣摦偝偣偰偄傑偡丅偙偺寢壥偐傜丄悈忋乮嬻婥拞乯偲悈拞偲偱偼丄傎偲傫偳徚旓揹椡偵曄壔偑側偄偙偲偑傢偐傝傑偡丅悈拞偱偺徚旓揹椡偲悈忋偱偺徚旓揹椡偲偺嵎偼丄悈傪悇偡偨傔偵梫偟偨摦椡偱偁傞偲峫偊傜傟傑偡偑丄偦偺摦椡偼旕忢偵彫偝偄偺偱丄應掕偑偱偒傑偣傫丅怳暆傪20亱偍傛傃40亱偲偟偨応崌傕摨條偺寢壥偑摼傜傟偰偄傑偡丅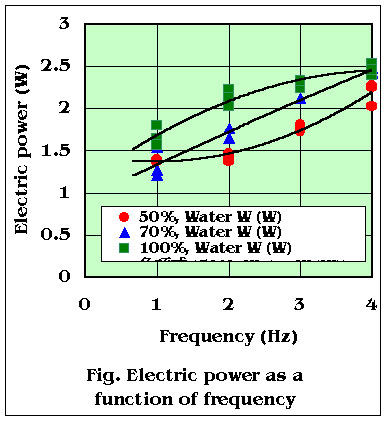 丂塃偺恾偼丄PPF-04傪悈拞偵擖傟偨忬懺偱丄旜傂傟偲旜暱偲偺埵憡嵎傪90亱丄拞怱幉偐傜嵍塃偵嵟戝20亱丄30亱偍傛傃40亱偢偮塣摦偝偣偨応崌偺塣揮廃攇悢偲徚旓揹椡偲偺娭學偱偡丅偙偺寢壥偐傜丄怳暆偑戝偒偄傎偳丄徚旓揹椡偑忋徃偟偰偄傞偙偲偑傢偐傝傑偡丅40亱偺怳暆偱摦偐偟偨応崌丄廃攇悢偑崅偄椞堟偱徚旓揹椡偑傗傗掅偔應掕偝傟偰偄傑偡偑丄偙傟偼揹尮偺揹埑偑掅偐偭偨偨傔偵丄崅偄廃攇悢偵僒乕儃儌乕僞偺塣摦偑捛廬偱偒側偐偭偨偨傔偱偁傞偲巚傢傟傑偡丅
丂塃偺恾偼丄PPF-04傪悈拞偵擖傟偨忬懺偱丄旜傂傟偲旜暱偲偺埵憡嵎傪90亱丄拞怱幉偐傜嵍塃偵嵟戝20亱丄30亱偍傛傃40亱偢偮塣摦偝偣偨応崌偺塣揮廃攇悢偲徚旓揹椡偲偺娭學偱偡丅偙偺寢壥偐傜丄怳暆偑戝偒偄傎偳丄徚旓揹椡偑忋徃偟偰偄傞偙偲偑傢偐傝傑偡丅40亱偺怳暆偱摦偐偟偨応崌丄廃攇悢偑崅偄椞堟偱徚旓揹椡偑傗傗掅偔應掕偝傟偰偄傑偡偑丄偙傟偼揹尮偺揹埑偑掅偐偭偨偨傔偵丄崅偄廃攇悢偵僒乕儃儌乕僞偺塣摦偑捛廬偱偒側偐偭偨偨傔偱偁傞偲巚傢傟傑偡丅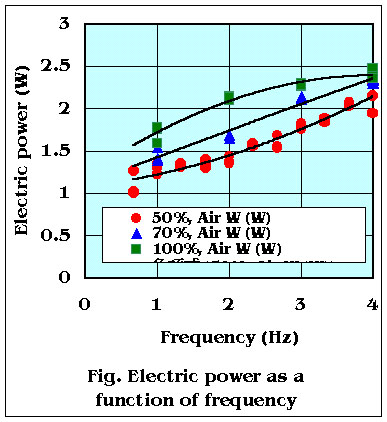 丂塃偺恾偼丄PPF-04傪悈忋偵弌偟偨忬懺偱丄旜傂傟偲旜暱偲偺埵憡嵎傪90亱丄拞怱幉偐傜嵍塃偵嵟戝20亱丄30亱偍傛傃40亱偢偮塣摦偝偣偨応崌偺塣揮廃攇悢偲徚旓揹椡偲偺娭學偱偡丅悈拞偱偺摿惈乮慜偺恾乯偲摨條偺寢壥偑摼傜傟傑偟偨丅
丂塃偺恾偼丄PPF-04傪悈忋偵弌偟偨忬懺偱丄旜傂傟偲旜暱偲偺埵憡嵎傪90亱丄拞怱幉偐傜嵍塃偵嵟戝20亱丄30亱偍傛傃40亱偢偮塣摦偝偣偨応崌偺塣揮廃攇悢偲徚旓揹椡偲偺娭學偱偡丅悈拞偱偺摿惈乮慜偺恾乯偲摨條偺寢壥偑摼傜傟傑偟偨丅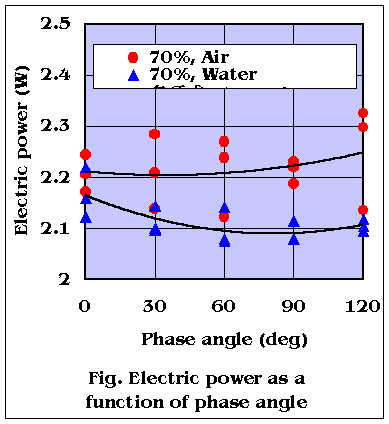 丂塃偺恾偼丄PPF-04傪悈忋偵弌偟偨忬懺偍傛傃悈拞偵擖傟偨忬懺偱丄旜傂傟偲旜暱偲偺埵憡嵎傪曄壔偝偣偨応崌偺徚旓揹椡傪帵偟偰偄傑偡丅怳暆偼拞怱幉偐傜嵍塃偵嵟戝30亱偢偮3Hz偺塣揮廃攇悢偱塣摦偝偣偰偄傑偡丅偙偺寢壥偐傜丄偽傜偮偒偼戝偒偄傕偺偺丄悈忋偵弌偟偨忬懺偱偼埵憡嵎偺曄壔偵懳偟偰徚旓揹椡偼偁傑傝曄壔偟偰偄側偄偙偲偑傢偐傝傑偡丅堦曽丄悈拞偱塣摦偝偣偨応崌偼埵憡嵎偑彫偝偄傎偳徚旓揹椡偑憹壛偡傞孹岦偑偁傞傛偆偵尒庴偗傜傟傑偡丅偙傟偼埵憡嵎偑彫偝偄傎偳悈傪悇偡摦椡偑戝偒偔側偭偰偄傞偨傔偱偁傞偲峫偊傜傟傑偡丅
丂塃偺恾偼丄PPF-04傪悈忋偵弌偟偨忬懺偍傛傃悈拞偵擖傟偨忬懺偱丄旜傂傟偲旜暱偲偺埵憡嵎傪曄壔偝偣偨応崌偺徚旓揹椡傪帵偟偰偄傑偡丅怳暆偼拞怱幉偐傜嵍塃偵嵟戝30亱偢偮3Hz偺塣揮廃攇悢偱塣摦偝偣偰偄傑偡丅偙偺寢壥偐傜丄偽傜偮偒偼戝偒偄傕偺偺丄悈忋偵弌偟偨忬懺偱偼埵憡嵎偺曄壔偵懳偟偰徚旓揹椡偼偁傑傝曄壔偟偰偄側偄偙偲偑傢偐傝傑偡丅堦曽丄悈拞偱塣摦偝偣偨応崌偼埵憡嵎偑彫偝偄傎偳徚旓揹椡偑憹壛偡傞孹岦偑偁傞傛偆偵尒庴偗傜傟傑偡丅偙傟偼埵憡嵎偑彫偝偄傎偳悈傪悇偡摦椡偑戝偒偔側偭偰偄傞偨傔偱偁傞偲峫偊傜傟傑偡丅