Rudder-effectiveness and Speed Correction Method
— To make the maneuvering motion of a model ship similar to that of a full-scale ship —
Research Overview
We are doing this kind of research. - easy explanations -
Experiments using a self-propelled model ship are a way to investigate the ship's kinematic performance. The Self-propelled model ship runs by rotating their propeller(s) and changes course by moving the rudder(s). Ships sometimes run in waves or wind. With a self-propelled model ship, we can directly examine the ship's motion under disturbance, such as how much speed reduces in waves and wind and how much rudder angle is needed to proceed on the desired course.
In this case, the phenomena that occur on a self-propelled model ship must be a realization of the phenomena that occur on a full-scale ship at the size of the model ship since we want to investigate the performance of the full-scale ship, not that of the model ship. Therefore, the phenomena of a self-propelled model ship must be similar to those of a full-scale ship (*1).
However, the motion of a self-propelled model ship is usually not similar to that of a full-scale ship. Since the size of a model ship is much smaller than a real ship, a model ship runs in relatively stickier water than a full-scale ship. As a result, the resistance of a model ship is relatively higher than the resistance of a full-scale ship (*2). Therefore, for a model ship to run at a speed similar to that of a real ship, the propeller of the model ship must generate relatively more thrust than the propeller of the full-scale ship. The fact that the thrust produced by the propellers is not similar means that the rudder behind the propeller is not analogous. As a result, the speed variation of a self-propelled model ship running in waves and wind and the rudder angle required for the ship to follow the desired course are not usually similar to those of a full-scale ship.
NMRI has developed RSC (Rudder-effectiveness and Speed Correction), a method of making the motion of a self-propelled model ship similar to that of a full-scale ship in calm water with no waves or wind and in disturbance with waves and wind by using a ducted fan-type auxiliary thrust device (*3) developed independently by NMRI. While the propeller speed of a usual self-propelled model ship is kept constant, the rudder-effectiveness ship speed correction controls both the auxiliary thrust and the propeller speed of the model ship according to the speed of the model ship, which changes from moment to moment. In this case, we control both the rudder effect and ship speed of the self-propelled model ship to be simultaneously similar to those of the full-scale ship. The rudder-effectiveness and ship speed correction method enable the motion of a model ship to resemble that of a full-scale ship not only in calm water but also under external disturbances.
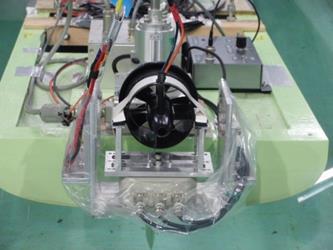
Figure 1 Duct fan type auxiliary thrust device
Figure 1 shows a ducted fan-type auxiliary propulsion system attached to the stern of a self-propelled model ship. It provides auxiliary thrust to self-propelled model ships. A small force gauge under the ducted fan measures the auxiliary thrust and the control PC provides feedback control of the auxiliary thrust.
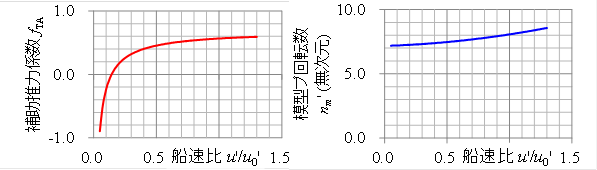
Figure 2 Auxiliary thrust coefficient and model ship propeller speed
In Figure 2, fTA on the vertical axis represents the auxiliary thrust coefficient, and nm' represents the propeller speed of the model ship (dimensionless.) fTA is a coefficient that expresses the ratio of the auxiliary thrust to the force required for friction correction (*2). When fTA is 1, the auxiliary thrust is equal to the force needed for friction correction (*2). The horizontal axis is the ship's speed expressed as a ratio to the reference speed in calm water. We use these characteristics to control the auxiliary thrust and propeller speed of the self-propelled model vessel. According to this characteristic, as the speed of the model ship decreases due to wind and waves, both auxiliary thrust and propeller speed will decrease. The fact that fTA is not 1 indicates that this is a new control method different from the conventional friction correction (*2).
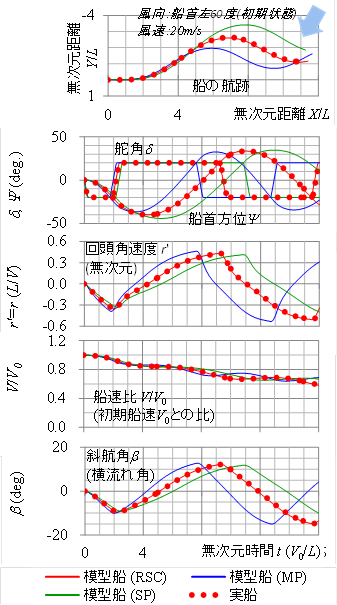
Figure 3 Simulation calculation results of zigzag maneuvering
Figure 3 shows the results of a simulation calculation of a 320-m-long tanker maneuvering zigzag in the wind. This maneuver involves alternating the rudder angle 20 degrees to the left and right. A wind speed of 20 m/s is blowing from 60 degrees to the left of the bow. MP (Model self-propulsion point) is the state of a usual self-propelled model ship without an auxiliary propulsion device, SP (Ship self-propulsion point) is the state in which the apparent drag of the model ship is analogous to that of a full-scale ship (friction correction (*2)) using auxiliary thrust, and RSC (Rudder-effectiveness and Speed Correction) indicates the state in which we perform rudder-effectiveness and speed correction. The RSC best represents the maneuver of the actual vessel.
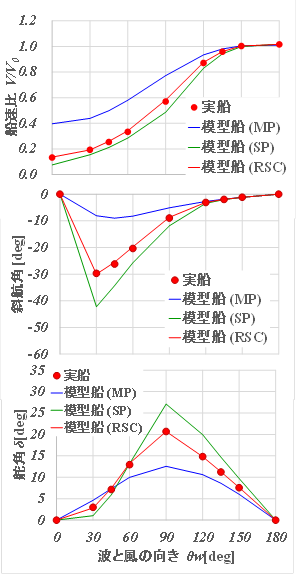
Figure 4 Simulation calculation results showing the ship's navigational state under disturbance
Figure 4 shows the calculation results for a tanker. The ship speed ratio V/V0 is the ratio of speed in disturbance to speed in calm water, the oblique angle β is the angle at which the ship sweeps sideways, and the rudder angle δ is the rudder angle required to keep the vessel on course. Very rough conditions with wave height of 16 m and wind speed of 30 m/s (Beaufort wind class 11), 0 degrees indicates head sea and headwind conditions. We can see that MP and SP differ from the navigational condition of the full-scale ship, while RSC well represents the condition of the full-scale ship.
*1 Similarity here refers to matching the Froude number of the actual ship and the model ship. The Froude number is a dimensionless value representing the ratio of gravity to inertia
*2 There is a way to give auxiliary thrust to a model ship to make the apparent drag similar to that of a genuine vessel. The way is called "friction modification." Until now, it has been very troublesome to perform friction correction on self-propelled model vessels.
*3 For details, please see our research article
 "Development of Auxiliary Thrust Device for Model Test — To control (apparent) resistance of model ship at will —."
"Development of Auxiliary Thrust Device for Model Test — To control (apparent) resistance of model ship at will —."
(2014.12.)