NMRIгғӢгғҘгғјгӮ№ гғҗгғғгӮҜгғҠгғігғҗгғј
NMRI NEWS
160<>2014/09/12<>жө·жҠҖз ”гҒ®жө·жҙӢй–ӢзҷәжҠҖиЎ“гҒёгҒ®еҸ–гӮҠзө„гҒҝ<>
гҖҖгҖҖеҪ“з ”з©¶жүҖгҒҜгҖҒгҒ“гӮҢгҒҫгҒ§еҹ№гҒЈгҒҰгҒҚгҒҹжө·дёӯж©ҹеҷЁгҒ«й–ўгҒҷгӮӢзҹҘиҰӢзӯүпјҲвҖ»пј‘пјүгҒ«еҹәгҒҘгҒҚгҖҒжҲҰз•Ҙзҡ„гӮӨгғҺгғҷгғјгӮ·гғ§гғіеүөйҖ гғ—гғӯгӮ°гғ©гғ пјҲпјіпј©пј°пјүпјҲвҖ»пј’пјүгҒ®иӘІйЎҢгҖҢж¬Ўдё–д»Јжө·жҙӢиіҮжәҗиӘҝжҹ»жҠҖиЎ“гҖҚгҒ®з ”究й–ӢзҷәиЁҲз”»пјҲгғ—гғӯгӮ°гғ©гғ гғҮгӮЈгғ¬гӮҜгӮҝгғјгҖҖжөҰиҫәеҫ№йғҺгғ»жқұдә¬еӨ§еӯҰеҗҚиӘүж•ҷжҺҲгҖҒеӣҪйҡӣиіҮжәҗй–Ӣзҷәз ”дҝ®гӮ»гғігӮҝгғјйЎ§е•ҸпјүгҒ«гҒҠгҒ‘гӮӢгҖҢпјЎпјөпј¶иӨҮж•°йҒӢз”ЁжүӢжі•зӯүгҒ®з ”究й–ӢзҷәгҖҚгӮ’жӢ…еӢҷгҒҷгӮӢгҒ“гҒЁгҒЁгҒӘгҒЈгҒҰгҒ„гҒҫгҒҷпјҲе№іжҲҗ26е№ҙ5жңҲ23ж—Ҙз·ҸеҗҲ科еӯҰжҠҖиЎ“гғ»гӮӨгғҺгғҷгғјгӮ·гғ§гғідјҡиӯ°гӮ¬гғҗгғӢгғігӮ°гғңгғјгғҲгҒ«гҒҠгҒ„гҒҰжүҝиӘҚгҖӮеҶ…й–Јеәңж”ҝзӯ–зөұжӢ¬е®ҳпјң科еӯҰжҠҖиЎ“гғ»гӮӨгғҺгғҷгғјгӮ·гғ§гғіжӢ…еҪ“пјһгҒ«гҒҠгҒ„гҒҰжұәе®ҡпјүгҖӮ
гҖҖе№іжҲҗ26е№ҙ7жңҲгҖҒдәҲз®—з®ЎзҗҶж©ҹй–ўгҒЁгҒ®еҘ‘зҙ„гӮ’з· зөҗгҒ—гҖҒз ”з©¶й–Ӣзҷәе®ҹж–ҪдҪ“еҲ¶ж§ӢзҜүгҒ®гҒҹгӮҒгҒ®дјҒ画競дәүгӮ’е®ҹж–ҪгҒҷгӮӢгҒ“гҒЁгҒ«гӮҲгӮҠгҖҒе…ҲжңҲгҖҒд»ҘдёӢгҒ®гғ‘гғјгғҲгғҠгғјгҒЁеҘ‘зҙ„гҒ«иҮігӮҠгҒҫгҒ—гҒҹгҖӮ
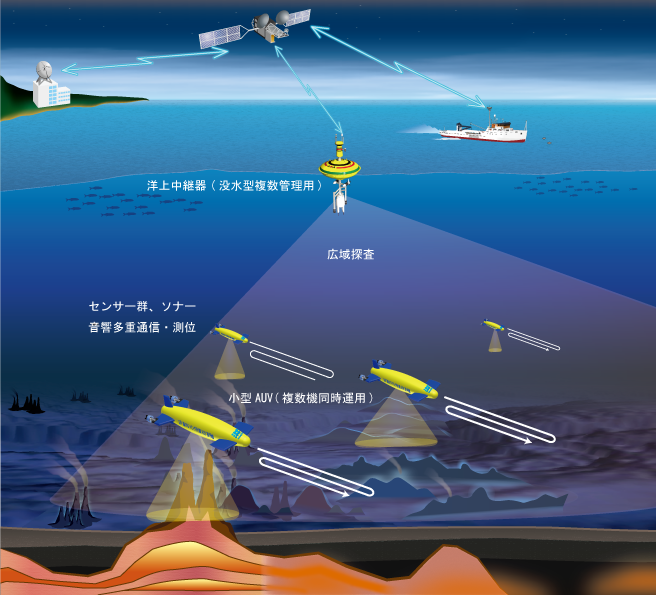
в– гҖҖе°ҸеһӢпјЎпјөпј¶зӯүй–Ӣзҷәпјҡдёүдә•йҖ иҲ№ж ӘејҸдјҡзӨҫ
в– гҖҖжҙӢдёҠдёӯз¶ҷеҷЁпјҲжІЎж°ҙеһӢиӨҮж•°з®ЎзҗҶз”Ёпјүзӯүй–Ӣзҷәпјҡж ӘејҸдјҡзӨҫпј©пјЁпј©
в– гҖҖжҠ•е…Ҙгғ»жҸҡеҸҺгӮ·гӮ№гғҶгғ зӯүй–Ӣзҷәпјҡе·қеҙҺйҮҚе·ҘжҘӯж ӘејҸдјҡзӨҫ
в– гҖҖеҚ”иӘҝиЎҢеӢ•гӮ·гӮ№гғҶгғ зӯүй–ӢзҷәпјҡеӣҪз«ӢеӨ§еӯҰжі•дәәжқұдә¬еӨ§еӯҰз”ҹз”ЈжҠҖиЎ“з ”з©¶жүҖ
гҖҖд»ҠеҫҢгҖҒгҒ“гӮҢгӮүгғ‘гғјгғҲгғҠгғјгҒЁгҒЁгӮӮгҒ«гҖҒдҪңжҘӯиҲ№гҒ§гӮӮйҒӢз”ЁгҒ§гҒҚгӮӢе°ҸеһӢпјЎпјөпј¶гӮ’й–ӢзҷәгҒҷгӮӢгҒЁгҒЁгӮӮгҒ«гҖҒгҒ“гӮҢгӮ’иӨҮж•°еҸ°еҗҢжҷӮгҒ«йҒӢз”ЁгҒ§гҒҚгӮӢжҠҖиЎ“гҒ®й–ӢзҷәгӮ’иЎҢгҒ„гҖҒеҠ№зҺҮзҡ„гҒӘжө·жҙӢиіҮжәҗиӘҝжҹ»жҠҖиЎ“гӮ’зўәз«ӢгҒҷгӮӢгҒЁгҒЁгӮӮгҒ«гҖҒжө·жҙӢиіҮжәҗиӘҝжҹ»з”ЈжҘӯгҒ®еүөеҮәгҒ«иІўзҢ®гҒ—гҒҰгҒ„гҒҚгҒҫгҒҷгҖӮ
й–ӢзҷәгҒҷгӮӢе°ҸеһӢпјЎпјөпј¶гҒ®зӣ®жЁҷгӮӨгғЎгғјгӮёпјҡ
гҖҖгҖҖв–јжңҖеӨ§жҪңиҲӘж·ұеәҰ2,000пҪҚ
гҖҖгҖҖв–јиүҮдҪ“еҜёжі•пјҡиғҙеҫ„гҒҜзӣҙеҫ„0.8пҪҚГ—е…Ёй•·4пҪҚд»ҘдёӢ
гҖҖгҖҖв–јз©әдёӯйҮҚйҮҸ800kgд»ҘдёӢ
гҖҖгҖҖв–јйҖҹеҠӣпјҲе·ЎиҲӘпјү1пҪһ3гғҺгғғгғҲ
гҖҖгҖҖв–јиҲӘз¶ҡжҷӮй–“12жҷӮй–“
гҖҖгҖҖв–јгӮөгғ–гғңгғҲгғ гғ—гғӯгғ•гӮЎгӮӨгғ©гғјпјҲеҲқеҸ·ж©ҹгҒ®гҒҝпјүгҒӘгҒ©
вҖ»пј‘гҖҖеҪ“з ”з©¶жүҖгҒ«гҒҠгҒ‘гӮӢжө·дёӯж©ҹеҷЁз ”究й–ӢзҷәгҒ®еҸ–зө„
гҖҖеҪ“з ”з©¶жүҖгҒҜгҖҒиҲ№иҲ¶гғ»жө·жҙӢгҒ«й–ўйҖЈгҒҷгӮӢж§ҳгҖ…гҒӘеҲҶйҮҺгҒ§гҒ®жҠҖиЎ“з ”з©¶гҒ«еҫ“дәӢгҒ—гҒҰгҒҠгӮҠгҖҒгҒқгҒ®дёҖз’°гҒЁгҒ—гҒҰж°ҙдёӯе·ҘеӯҰгҖҒжөҒдҪ“е·ҘеӯҰгӮ’й§ҶдҪҝгҒ—гҒҹпјЎпјөпј¶гҒ®й–ӢзҷәгҖҒйҒӢз”ЁгӮ’иЎҢгҒЈгҒҰгҒҚгҒҰгҒ„гҒҫгҒҷгҖӮе№іжҲҗ11пҪһ14е№ҙеәҰгҖҢж·ұжө·гғўгғӢгӮҝгғјз”Ёе°ҸеһӢгғӯгғңгғғгғҲгҒ®иӘҝжҹ»гҖҚгҖҒе№іжҲҗ16пҪһ18е№ҙеәҰгҖҢж·ұжө·гғўгғӢгӮҝгғјз”Ёе°ҸеһӢгғӯгғңгғғгғҲгҒ®иЁӯиЁҲгҒ«й–ўгҒҷгӮӢз ”з©¶пјҲиҮӘеҫӢеһӢжө·дёӯгғӯгғңгғғгғҲгҖҺгғ„гғҠгӮөгғігғүпјңгҖҖTuna-SandпјһгҖҸпјүгҖҚгӮ’е®ҹж–ҪгҒ—гҖҒпјЎпјөпј¶гҒ®й–Ӣзҷәгғ»йҒӢз”Ёе®ҹзёҫгӮ’жңүгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
гҖҖгҒҫгҒҹгҖҒи©ҰйЁ“иЁӯеӮҷгҒЁгҒ—гҒҰеҗ„зЁ®и©ҰйЁ“ж°ҙж§ҪгӮ„гҖҢй«ҳең§гӮҝгғігӮҜгҖҚгӮӮдҝқжңүгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
вҖ»пј’гҖҖжҲҰз•Ҙзҡ„гӮӨгғҺгғҷгғјгӮ·гғ§гғіеүөйҖ гғ—гғӯгӮ°гғ©гғ пјҲпјіпј©пј°пјү
гҖҖз·ҸеҗҲ科еӯҰжҠҖиЎ“гғ»гӮӨгғҺгғҷгғјгӮ·гғ§гғідјҡиӯ°пјҲпјЈпјіпјҙпј©пјүгҒҢиҮӘгӮүгҒ®еҸёд»ӨеЎ”ж©ҹиғҪгӮ’зҷәжҸ®гҒ—гҒҰгҖҒеәңзңҒгҒ®жһ гӮ„ж—§жқҘгҒ®еҲҶйҮҺгҒ®жһ гӮ’и¶…гҒҲгҒҹгғһгғҚгӮёгғЎгғігғҲгҒ«дё»е°Һзҡ„гҒӘеҪ№еүІгӮ’жһңгҒҹгҒҷгҒ“гҒЁгӮ’йҖҡгҒҳгҒҰгҖҒ科еӯҰжҠҖиЎ“гӮӨгғҺгғҷгғјгӮ·гғ§гғігӮ’е®ҹзҸҫгҒҷгӮӢгҒҹгӮҒгҒ«ж–°гҒҹгҒ«еүөиЁӯгҒ—гҒҹгғ—гғӯгӮ°гғ©гғ гҖӮпјЈпјіпјҙпј©гҒ«гӮҲгӮҠгҖҒгҖҢж¬Ўдё–д»Јжө·жҙӢиіҮжәҗиӘҝжҹ»жҠҖиЎ“гҖҚгӮ’еҗ«гӮҖ10иӘІйЎҢгҒҢйҒёе®ҡгҒ•гӮҢгҒҫгҒ—гҒҹгҖӮ
е№іжҲҗ26е№ҙ9жңҲ12ж—Ҙ
зӢ¬з«ӢиЎҢж”ҝжі•дәәгҖҖжө·дёҠжҠҖиЎ“е®үе…Ёз ”з©¶жүҖ
жө·жҠҖз ”гҒ®жө·жҙӢй–ӢзҷәжҠҖиЎ“гҒёгҒ®еҸ–гӮҠзө„гҒҝ
вҖ•пјіпј©пј°ж¬Ўдё–д»Јжө·жҙӢиіҮжәҗиӘҝжҹ»жҠҖиЎ“гҒ§гҒ®пјЎпјөпј¶й–ӢзҷәгҒ«гҒӨгҒ„гҒҰвҖ•
вҖ•пјіпј©пј°ж¬Ўдё–д»Јжө·жҙӢиіҮжәҗиӘҝжҹ»жҠҖиЎ“гҒ§гҒ®пјЎпјөпј¶й–ӢзҷәгҒ«гҒӨгҒ„гҒҰвҖ•
гҖҖгҖҖеҪ“з ”з©¶жүҖгҒҜгҖҒгҒ“гӮҢгҒҫгҒ§еҹ№гҒЈгҒҰгҒҚгҒҹжө·дёӯж©ҹеҷЁгҒ«й–ўгҒҷгӮӢзҹҘиҰӢзӯүпјҲвҖ»пј‘пјүгҒ«еҹәгҒҘгҒҚгҖҒжҲҰз•Ҙзҡ„гӮӨгғҺгғҷгғјгӮ·гғ§гғіеүөйҖ гғ—гғӯгӮ°гғ©гғ пјҲпјіпј©пј°пјүпјҲвҖ»пј’пјүгҒ®иӘІйЎҢгҖҢж¬Ўдё–д»Јжө·жҙӢиіҮжәҗиӘҝжҹ»жҠҖиЎ“гҖҚгҒ®з ”究й–ӢзҷәиЁҲз”»пјҲгғ—гғӯгӮ°гғ©гғ гғҮгӮЈгғ¬гӮҜгӮҝгғјгҖҖжөҰиҫәеҫ№йғҺгғ»жқұдә¬еӨ§еӯҰеҗҚиӘүж•ҷжҺҲгҖҒеӣҪйҡӣиіҮжәҗй–Ӣзҷәз ”дҝ®гӮ»гғігӮҝгғјйЎ§е•ҸпјүгҒ«гҒҠгҒ‘гӮӢгҖҢпјЎпјөпј¶иӨҮж•°йҒӢз”ЁжүӢжі•зӯүгҒ®з ”究й–ӢзҷәгҖҚгӮ’жӢ…еӢҷгҒҷгӮӢгҒ“гҒЁгҒЁгҒӘгҒЈгҒҰгҒ„гҒҫгҒҷпјҲе№іжҲҗ26е№ҙ5жңҲ23ж—Ҙз·ҸеҗҲ科еӯҰжҠҖиЎ“гғ»гӮӨгғҺгғҷгғјгӮ·гғ§гғідјҡиӯ°гӮ¬гғҗгғӢгғігӮ°гғңгғјгғҲгҒ«гҒҠгҒ„гҒҰжүҝиӘҚгҖӮеҶ…й–Јеәңж”ҝзӯ–зөұжӢ¬е®ҳпјң科еӯҰжҠҖиЎ“гғ»гӮӨгғҺгғҷгғјгӮ·гғ§гғіжӢ…еҪ“пјһгҒ«гҒҠгҒ„гҒҰжұәе®ҡпјүгҖӮ
гҖҖе№іжҲҗ26е№ҙ7жңҲгҖҒдәҲз®—з®ЎзҗҶж©ҹй–ўгҒЁгҒ®еҘ‘зҙ„гӮ’з· зөҗгҒ—гҖҒз ”з©¶й–Ӣзҷәе®ҹж–ҪдҪ“еҲ¶ж§ӢзҜүгҒ®гҒҹгӮҒгҒ®дјҒ画競дәүгӮ’е®ҹж–ҪгҒҷгӮӢгҒ“гҒЁгҒ«гӮҲгӮҠгҖҒе…ҲжңҲгҖҒд»ҘдёӢгҒ®гғ‘гғјгғҲгғҠгғјгҒЁеҘ‘зҙ„гҒ«иҮігӮҠгҒҫгҒ—гҒҹгҖӮ
в– гҖҖе°ҸеһӢпјЎпјөпј¶зӯүй–Ӣзҷәпјҡдёүдә•йҖ иҲ№ж ӘејҸдјҡзӨҫ
в– гҖҖжҙӢдёҠдёӯз¶ҷеҷЁпјҲжІЎж°ҙеһӢиӨҮж•°з®ЎзҗҶз”Ёпјүзӯүй–Ӣзҷәпјҡж ӘејҸдјҡзӨҫпј©пјЁпј©
в– гҖҖжҠ•е…Ҙгғ»жҸҡеҸҺгӮ·гӮ№гғҶгғ зӯүй–Ӣзҷәпјҡе·қеҙҺйҮҚе·ҘжҘӯж ӘејҸдјҡзӨҫ
в– гҖҖеҚ”иӘҝиЎҢеӢ•гӮ·гӮ№гғҶгғ зӯүй–ӢзҷәпјҡеӣҪз«ӢеӨ§еӯҰжі•дәәжқұдә¬еӨ§еӯҰз”ҹз”ЈжҠҖиЎ“з ”з©¶жүҖ
гҖҖд»ҠеҫҢгҖҒгҒ“гӮҢгӮүгғ‘гғјгғҲгғҠгғјгҒЁгҒЁгӮӮгҒ«гҖҒдҪңжҘӯиҲ№гҒ§гӮӮйҒӢз”ЁгҒ§гҒҚгӮӢе°ҸеһӢпјЎпјөпј¶гӮ’й–ӢзҷәгҒҷгӮӢгҒЁгҒЁгӮӮгҒ«гҖҒгҒ“гӮҢгӮ’иӨҮж•°еҸ°еҗҢжҷӮгҒ«йҒӢз”ЁгҒ§гҒҚгӮӢжҠҖиЎ“гҒ®й–ӢзҷәгӮ’иЎҢгҒ„гҖҒеҠ№зҺҮзҡ„гҒӘжө·жҙӢиіҮжәҗиӘҝжҹ»жҠҖиЎ“гӮ’зўәз«ӢгҒҷгӮӢгҒЁгҒЁгӮӮгҒ«гҖҒжө·жҙӢиіҮжәҗиӘҝжҹ»з”ЈжҘӯгҒ®еүөеҮәгҒ«иІўзҢ®гҒ—гҒҰгҒ„гҒҚгҒҫгҒҷгҖӮ
й–ӢзҷәгҒҷгӮӢе°ҸеһӢпјЎпјөпј¶гҒ®зӣ®жЁҷгӮӨгғЎгғјгӮёпјҡ
гҖҖгҖҖв–јжңҖеӨ§жҪңиҲӘж·ұеәҰ2,000пҪҚ
гҖҖгҖҖв–јиүҮдҪ“еҜёжі•пјҡиғҙеҫ„гҒҜзӣҙеҫ„0.8пҪҚГ—е…Ёй•·4пҪҚд»ҘдёӢ
гҖҖгҖҖв–јз©әдёӯйҮҚйҮҸ800kgд»ҘдёӢ
гҖҖгҖҖв–јйҖҹеҠӣпјҲе·ЎиҲӘпјү1пҪһ3гғҺгғғгғҲ
гҖҖгҖҖв–јиҲӘз¶ҡжҷӮй–“12жҷӮй–“
гҖҖгҖҖв–јгӮөгғ–гғңгғҲгғ гғ—гғӯгғ•гӮЎгӮӨгғ©гғјпјҲеҲқеҸ·ж©ҹгҒ®гҒҝпјүгҒӘгҒ©
е°ҸеһӢпјЎпјөпј¶гӮ’иӨҮж•°еҸ°йҒӢз”ЁгҒҷгӮӢгӮӨгғЎгғјгӮё
вҖ»пј‘гҖҖеҪ“з ”з©¶жүҖгҒ«гҒҠгҒ‘гӮӢжө·дёӯж©ҹеҷЁз ”究й–ӢзҷәгҒ®еҸ–зө„
гҖҖеҪ“з ”з©¶жүҖгҒҜгҖҒиҲ№иҲ¶гғ»жө·жҙӢгҒ«й–ўйҖЈгҒҷгӮӢж§ҳгҖ…гҒӘеҲҶйҮҺгҒ§гҒ®жҠҖиЎ“з ”з©¶гҒ«еҫ“дәӢгҒ—гҒҰгҒҠгӮҠгҖҒгҒқгҒ®дёҖз’°гҒЁгҒ—гҒҰж°ҙдёӯе·ҘеӯҰгҖҒжөҒдҪ“е·ҘеӯҰгӮ’й§ҶдҪҝгҒ—гҒҹпјЎпјөпј¶гҒ®й–ӢзҷәгҖҒйҒӢз”ЁгӮ’иЎҢгҒЈгҒҰгҒҚгҒҰгҒ„гҒҫгҒҷгҖӮе№іжҲҗ11пҪһ14е№ҙеәҰгҖҢж·ұжө·гғўгғӢгӮҝгғјз”Ёе°ҸеһӢгғӯгғңгғғгғҲгҒ®иӘҝжҹ»гҖҚгҖҒе№іжҲҗ16пҪһ18е№ҙеәҰгҖҢж·ұжө·гғўгғӢгӮҝгғјз”Ёе°ҸеһӢгғӯгғңгғғгғҲгҒ®иЁӯиЁҲгҒ«й–ўгҒҷгӮӢз ”з©¶пјҲиҮӘеҫӢеһӢжө·дёӯгғӯгғңгғғгғҲгҖҺгғ„гғҠгӮөгғігғүпјңгҖҖTuna-SandпјһгҖҸпјүгҖҚгӮ’е®ҹж–ҪгҒ—гҖҒпјЎпјөпј¶гҒ®й–Ӣзҷәгғ»йҒӢз”Ёе®ҹзёҫгӮ’жңүгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
гҖҖгҒҫгҒҹгҖҒи©ҰйЁ“иЁӯеӮҷгҒЁгҒ—гҒҰеҗ„зЁ®и©ҰйЁ“ж°ҙж§ҪгӮ„гҖҢй«ҳең§гӮҝгғігӮҜгҖҚгӮӮдҝқжңүгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
вҖ»пј’гҖҖжҲҰз•Ҙзҡ„гӮӨгғҺгғҷгғјгӮ·гғ§гғіеүөйҖ гғ—гғӯгӮ°гғ©гғ пјҲпјіпј©пј°пјү
гҖҖз·ҸеҗҲ科еӯҰжҠҖиЎ“гғ»гӮӨгғҺгғҷгғјгӮ·гғ§гғідјҡиӯ°пјҲпјЈпјіпјҙпј©пјүгҒҢиҮӘгӮүгҒ®еҸёд»ӨеЎ”ж©ҹиғҪгӮ’зҷәжҸ®гҒ—гҒҰгҖҒеәңзңҒгҒ®жһ гӮ„ж—§жқҘгҒ®еҲҶйҮҺгҒ®жһ гӮ’и¶…гҒҲгҒҹгғһгғҚгӮёгғЎгғігғҲгҒ«дё»е°Һзҡ„гҒӘеҪ№еүІгӮ’жһңгҒҹгҒҷгҒ“гҒЁгӮ’йҖҡгҒҳгҒҰгҖҒ科еӯҰжҠҖиЎ“гӮӨгғҺгғҷгғјгӮ·гғ§гғігӮ’е®ҹзҸҫгҒҷгӮӢгҒҹгӮҒгҒ«ж–°гҒҹгҒ«еүөиЁӯгҒ—гҒҹгғ—гғӯгӮ°гғ©гғ гҖӮпјЈпјіпјҙпј©гҒ«гӮҲгӮҠгҖҒгҖҢж¬Ўдё–д»Јжө·жҙӢиіҮжәҗиӘҝжҹ»жҠҖиЎ“гҖҚгӮ’еҗ«гӮҖ10иӘІйЎҢгҒҢйҒёе®ҡгҒ•гӮҢгҒҫгҒ—гҒҹгҖӮ