振れ回り運動中船舶の錨鎖の水中挙動評価に関する研究
Research Overview
研究概要
近年強い勢力を保ったまま日本周辺に接近、上陸する台風による被害が増加しています。荒天下における錨泊中船舶は投錨したままの状態で波や風により押し流されてしまう現象(以下走錨と表記)により座礁、他船や構造物への衝突のリスクを抱えています。
走錨は船舶が錨泊地点に留まろうとする力(以下係駐力と表記)が外力を下回る頻度が増加すると発生します。係駐力は錨の把駐力と鎖の海底設置面における摩擦力の和で表せます。本研究では錨泊中船舶の走錨に焦点を当て、その初期段階で発生する振れ回り運動中における係駐力を評価するために、鎖の海底接地長を推定する手法の検証を目的としました。
推定には鎖の上端張力の水平成分とカテナリー理論を使用して、推定値を検証するために内航タンカー模型と錨鎖模型を用いて水槽試験を実施しました。水槽試験では水槽底に水中用モーションキャプチャーカメラを設置し反射マーカーを付けた鎖の挙動を計測しました。また、単錨泊や双錨泊のような複数の錨泊状態を再現しました。
海洋システム研究グループではこのような水中線状構造物の挙動評価・推定モデル構築に関する研究を進めています。
研究対象船と基本諸元

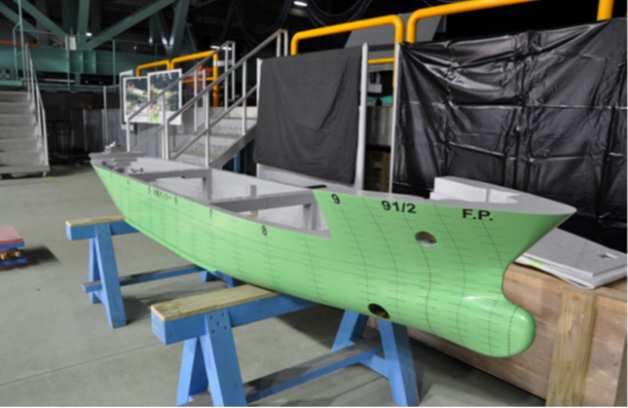
図1 内航タンカー基本諸元と模型
水槽試験
錨鎖模型に反射マーカーを取り付け、水槽底に沈めた水中モーションキャプチャーカメラで青色LEDライトの反射光を捉える事により、反射マーカーの3次元位置を計測しました。反射マーカー内には錘を仕込んで錨鎖全体の水中重量を調整しました。
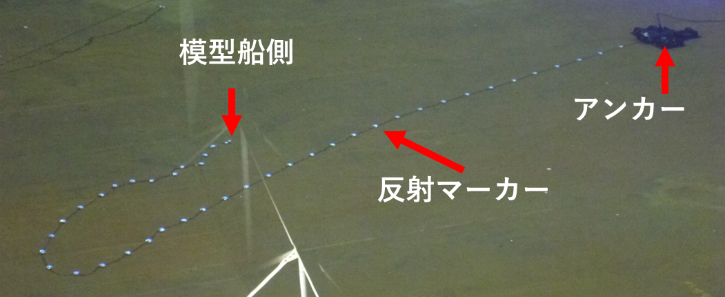

図2 反射マーカー付き錨鎖と計測中の様子
試験結果の例
試験結果と推定値について実機スケールで約820秒間の最小値と平均値を比較しました。その結果、ほぼ全てのケースで推定値が計測値よりも安全側に評価している事が分かりました。
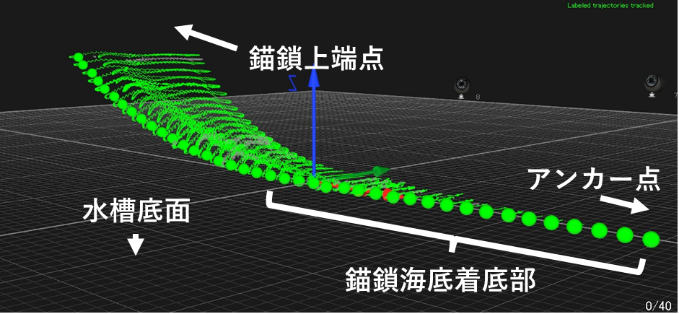
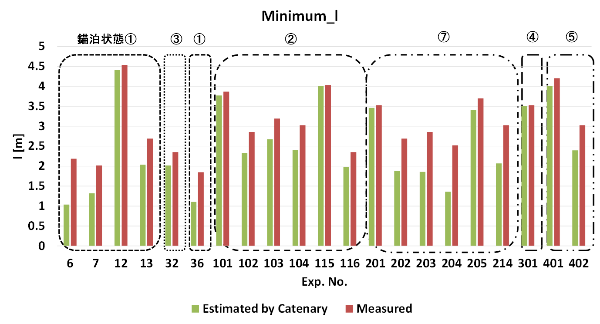
図3 計測結果の一例と推定値と計測値の比較
謝辞
本研究は国土交通省海事局の「走錨リスク判定システムの確立のための調査事業」の一環として実施しました。関係各位に深く感謝申し上げます。
発表文献
- 渡邊充史、長谷川賢太、鈴木良介、齊藤昌勝、河村昂軌、柳裕一朗、湯川和浩、田口晴邦:走錨初期段階の振れ回り運動を対象とした数値計算モデルの構築と挙動評価、日本船舶海洋工学会論文集、第38号、pp.29-49、2024.
- 渡邊充史、湯川和浩:一点係留された船体の振れ回り運動に関する数値計算モデルの構築と挙動評価、日本船舶海洋工学会論文集、第32号、pp.47-64、2020.
お問い合わせ先(技術相談窓口)
海上技術安全研究所 企画部広報係
問い合わせフォーム:https://www.nmri.go.jp/contact/
必要事項をご記入の上、お問い合わせ項目で「技術相談」を選択して送信してください。
 https://www.nmri.go.jp/service/consultation.html
https://www.nmri.go.jp/service/consultation.html