お知らせ
NEWS
「衝突を自動的に回避する避航操船システムに係る実験」を公開(結果報告)
公開実験の司会及び本日公開する共同研究の紹介を知識・データシステム系の間島系長が行いました。過去、OZT(Obstacle Zone by Target:相手船による航行妨害ゾーン)を海図上に表示する公開実験を行ったが、今回は更に進化し、OZTの海域を図示すると共にそれを避けるための航路を計算し表示する機能を追加しました。更に避航する航路に沿った船の操船を自動化したシミュレーションを公開実験でご覧頂きました。公開実験の説明については、知識・データシステム系の佐藤主任研究員が行いました。最初にOZTの考え方、衝突危険領域をどの様に算出するかレーダー図等を用いて説明し、避航操船システムとしてソフトウェアの開発を行っていることにも触れました。開発しているシステムでは、情報表示画面は右側に俯瞰ビュー(レーダー画面表示)、左側に景観ビュー(ブリッジに立った船員の視点)が表示でき、AISデータを取得してタブレット端末に表示出来るとの説明もありました。公開実験には、業界から海運会社・船主、舶用機器メーカーほか、メディアなど106名の参加を頂きました。
公開実験では180mのバルクキャリアでシミュレーションを実施
公開実験では、タブレットの情報表示画面で算出した避航経路をシミュレーションする模様をご覧頂きました。ウェビナーでの公開実験でしたが、情報表示画面とブリッジの景観画面と船橋の映像を切り替えて、出来るだけ研究所に来て頂いて操船リスクシミュレータで実験を見て頂いた場合と同じになるように配信させて頂きました。現地で見て頂く場合よりも情報表示画面やレーダー画面などは、配信した映像の方が詳細に見て頂くことが出来ました。佐藤主任研究員がバルクキャリアが他船を避航する様子を分かり易く説明しました。リアルタイムシミュレーションのため、交通帯に入るまで時間があったので、景観ビューでは常に角度表示があるので他船の位置が瞬時に分かる点や他船が本船に到着する時間表示がある点なども説明がありました。
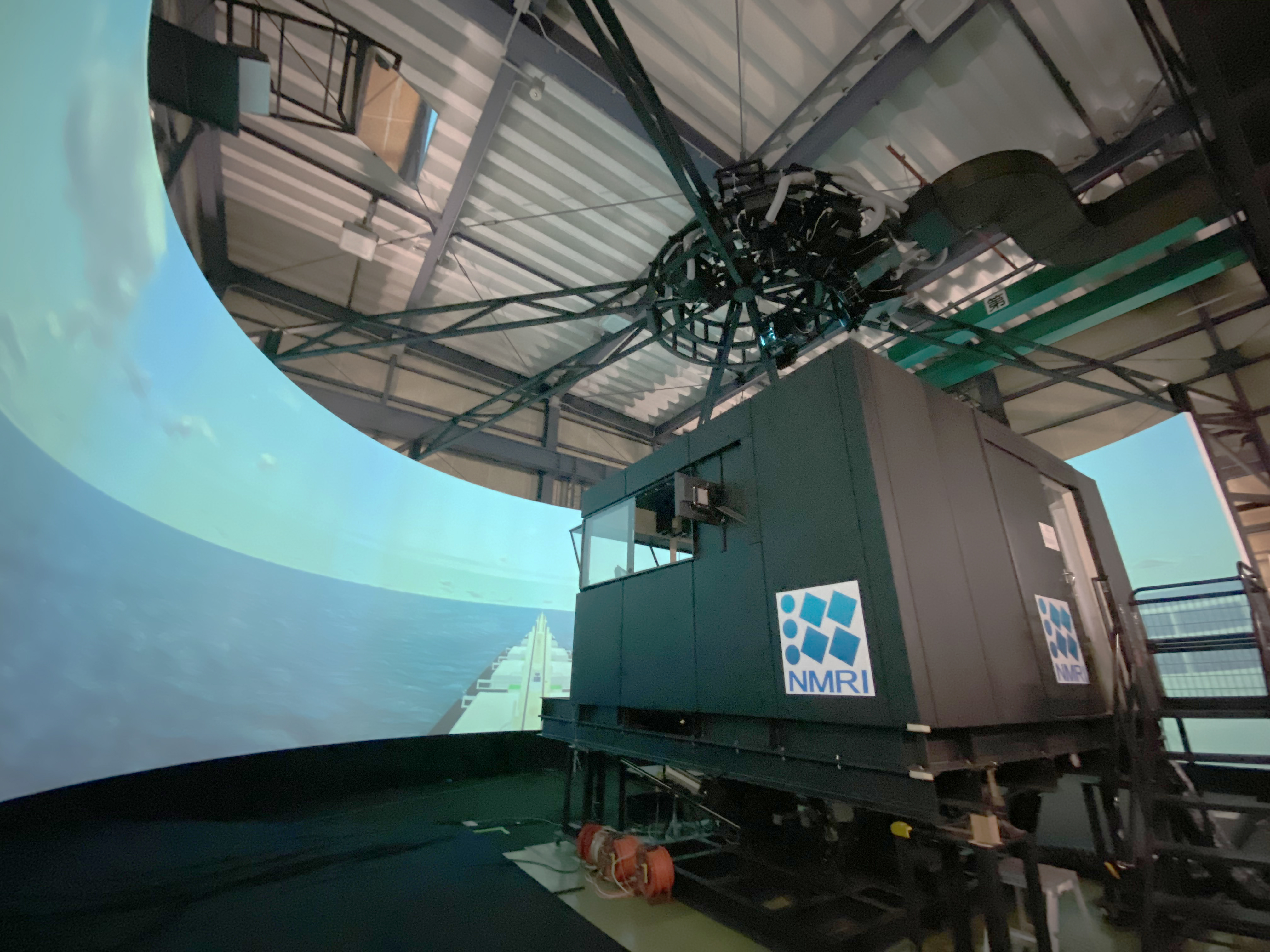
操船リスクシミュレータ
実海域でも支援装置として使用
今回の公開実験では、東京海洋大学所有の汐路丸にて情報表示装置を航行支援装置として使用した実海域での実験動画を参加頂いた皆さんにご視聴頂きました。実船での使用では表示装置を見てフィードバックを頂きながらどの様に表示するかどの様に航行支援に役立てるか等協力頂きながら研究開発を進めています。公開実験のまとめでは「今後は、自動避航アルゴリズム意の構築とともに、操船者への支援の観点でも開発を進める」と佐藤主任研究員から力強く説明がありました。最後に本研究は、株式会社商船三井、株式会社MOLMARIN、商船三井テクノトレード株式会社、株式会社YDKテクノロジーズ及び国立大学法人東京海洋大学と共同で避航操船技術の確立を目指して研究開発を進めている旨、説明と謝辞がありました。
また、今後の研究計画として研究所が所有している小型船を用いて、「遠隔操船」技術の研究開発や周辺監視のための最新のモニタリングシステムや船陸間通信技術の実証試験を予定している旨も説明がありました。質疑応答では操船支援技術に関して多くの質問があり、船の離着桟技術への関心の高さが伺えました。

実験の説明を行う佐藤主任研究員