гҒҠзҹҘгӮүгҒӣ
NEWS
ж·ұеұӨеӯҰзҝ’гҒ«гӮҲгӮӢд»–иҲ№иҲ№еҪұжӨңеҮәгғ»дҪҚзҪ®жҺЁе®ҡгӮ·гӮ№гғҶгғ гҒ®е…¬й–Ӣе®ҹйЁ“гӮ’е®ҹж–Ҫ
гҖҢж©ҹжў°гҒ®зӣ®гҖҚгҒ§д»–иҲ№жӨңеҮәгҒҷгӮӢгӮ·гӮ№гғҶгғ гӮ’ж§ӢзҜүгҖҒиҮӘеҫӢйҒӢиҲӘиҲ№гӮ„е®үе…ЁйҒӢиҲӘгӮ’ж”ҜжҸҙ
жҳЁд»ҠгҖҒе•ҸйЎҢгҒЁгҒӘгҒЈгҒҰгҒ„гӮӢд№—зө„е“ЎгҒ®дёҚи¶ігӮ„иҲ№еҶ…йҒӢиҲӘзҸҫе ҙгҒ«гҒҠгҒ‘гӮӢзңҒеҠӣеҢ–гҒ®иҰізӮ№гҒӢгӮүгҖҒиҝ‘е№ҙгҒ§гҒҜиҮӘеӢ•йҒӢиҲӘиҲ№гӮ„йҒ йҡ”ж“ҚиҲ№гҖҒиҰӢејөгӮҠж”ҜжҸҙзӯүгҒ®жҠҖиЎ“й–ӢзҷәгҒ«еҗ‘гҒ‘гҒҹз ”з©¶гҒҢйҖІгӮ“гҒ§гҒ„гҒҫгҒҷгҖӮгҒ“гӮҢгӮүгҒ«гҒҠгҒ„гҒҰд»–иҲ№жӨңеҮәгҒҜгҖҒе®үе…ЁгҒ®гҒҹгӮҒгҒ«жңҖйҮҚиҰҒиҰ–гҒ•гӮҢгӮӢгҒ№гҒҚжҠҖиЎ“гҒ§гҒҷгҒҢгҖҒдёҖиҲ¬зҡ„гҒ«гҒҜгҖҒдё»гҒ«гғ¬гғјгғҖгғјгҖҒиҲ№иҲ¶иҮӘеӢ•иӯҳеҲҘгӮ·гӮ№гғҶгғ пјҲAISпјүгҒ«дҫқеӯҳгҒ—гҖҒжҺҘеІёгҒ®гҒҹгӮҒгҒ®гғ¬гғјгӮ¶гғјгғ¬гғјгғҖгғјпјҲLIDARпјүгӮ„гҖҒжңүдәәзӣЈиҰ–гҒ®гҒҹгӮҒгҒ®гӮ«гғЎгғ©гҒҢиЈңеҠ©зҡ„гҒ«иЈ…еӮҷгҒ•гӮҢгӮӢгҒ«гҒЁгҒ©гҒҫгҒЈгҒҰгҒ„гӮӢгҒ®гҒҢзҸҫзҠ¶гҒ§гҒҷгҖӮгҒ—гҒӢгҒ—гҖҒгғ¬гғјгғҖгғјгҒ«гҒҜжҚ•жҚүгҒ•гӮҢгҒ«гҒҸгҒ„жқҗиіӘгӮ„еҪўзҠ¶гҒ®иҲ№гӮ„е°ҸиҲҹгҒ®е•ҸйЎҢгҖҒAISгҒ«гҒҜйқһжҗӯијүиҲ№гӮ„ж”№з«„гҒ®е®№жҳ“жҖ§гҒ®е•ҸйЎҢзӯүгҖҒеӨҡиҲ№жӨңеҮәгҒ®зўәе®ҹжҖ§гҒ«гҒҜдёҚеҚҒеҲҶгҒӘйқўгҒҢгҒӮгӮҠгҒҫгҒҷгҖӮгҒқгҒ®гҒҹгӮҒгҖҒгҒ“гӮҢгӮүдёҖиҲ¬зҡ„гҒӘж–№ејҸгҒ гҒ‘гҒ«дҫқжӢ гҒҷгӮӢгҒ“гҒЁгҒӘгҒҸгҖҒгҖҢеҹәжң¬гҒҜиҰӢејөгӮҠгҖҚгҒЁгҒ„гӮҸгӮҢгҒҰгҒ„гӮӢгӮҲгҒҶгҒ«гҖҒгӮ«гғЎгғ©гҒ«гӮҲгӮӢиҰӢејөгӮҠж”ҜжҸҙгӮ·гӮ№гғҶгғ ж§ӢзҜүгҒ®еҝ…иҰҒжҖ§гҒҢй«ҳгҒҫгҒЈгҒҰгҒ„гҒҫгҒҷгҖӮд»ҠеӣһгҒ®е…¬й–Ӣе®ҹйЁ“гҒ§гҒҜгҖҒеҫ“жқҘгҒ®иЈ…зҪ®гҒ§гҒҜжҚ•жҚүгҒҢйӣЈгҒ—гҒ„йҡңе®ізү©гӮ’жӨңеҮәгҒ—гҒҰйҒҝиҲӘгғ—гғӯгӮ°гғ©гғ гӮ„ж“ҚиҲ№иҖ…гҒ«жҸҗзӨәеҸҜиғҪгҒӘгӮӮгҒ®гҒЁгҒ—гҒҰгҖҒеҸӮеҠ иҖ…гҒ®ж–№гҖ…гҒ«е…¬й–ӢгҒ—гҒҫгҒ—гҒҹгҖӮ
дәәе·ҘзҹҘиғҪгҒ§иҲ№еҪұгӮ’жӨңеҮәгҖҒдёЎзңјз«ӢдҪ“иҰ–гҒ§дҪҚзҪ®гӮ’жҺЁе®ҡгҒ—гҒҰйӣ»еӯҗжө·еӣігҒ«иЎЁзӨә
ејҠжүҖгҒ§гҒҜе•ҶиҲ№гҒ®е·ҰеҸіиҲ·гҒ«гӮ«гғЎгғ©гӮ’иЁӯзҪ®гҒ—гҖҒж·ұеұӨеӯҰзҝ’гҒ«гӮҲгӮҠиҲ№еҪұгӮ’жӨңеҮәгҒҷгӮӢгҒЁгҒЁгӮӮгҒ«гҖҒз«ӢдҪ“иҰ–гҒ®жүӢжі•гҒ§гҒқгҒ®дҪҚзҪ®гӮ’жҺЁе®ҡгҒ—гҒҰйӣ»еӯҗжө·еӣігҒ«йҮҚз•іиЎЁзӨәгҒҷгӮӢгӮ·гӮ№гғҶгғ гӮ’ж§ӢзҜүгҒ—гҖҒзҙ„2kmе…ҲгҒ®5mзЁӢеәҰгҒ®гғ–гӮӨпјҲеҪұеғҸгҒ®еӨ§гҒҚгҒ•18pixelпјүгӮ’е®үе®ҡзҡ„гҒ«жӨңеҮәгҒ—гҖҒгҒӢгҒӨзҙ„1.5%гҒ®иӘӨе·®гҒ§гҒ®дҪҚзҪ®жҺЁе®ҡгӮ’йҒ”жҲҗгҒ—гҒҫгҒ—гҒҹгҖӮд»ҠеӣһгҒ®е…¬й–Ӣе®ҹйЁ“гҒ§гҒҜгҖҒдәӢеүҚгҒ«иҲ№дёҠгҒ§ж’®еҪұгҒ—гҒҹжҷҜиҰіз”»еғҸгҒЁиҲӘжө·иЁҲеҷЁгҒӢгӮүгҒ®йҒӢиҲӘжғ…е ұгӮ’з”Ёж„ҸгҒ—гҖҒж·ұеұӨеӯҰзҝ’гҒ«гӮҲгӮӢиҲ№еҪұжӨңеҮәгҒЁдҪҚзҪ®жҺЁе®ҡгӮ’гғӘгӮўгғ«гӮҝгӮӨгғ гҒ«иЎҢгҒЈгҒҰжӨңеҮәзөҗжһңгҒЁйӣ»еӯҗжө·еӣігҒёгҒ®дҪҚзҪ®жҺЁе®ҡзөҗжһңиЎЁзӨәгӮ’иЎҢгҒ„гҒҫгҒ—гҒҹгҖӮгҒҫгҒҹAISгӮ·гғігғңгғ«гӮ’йҮҚз•іиЎЁзӨәгҒ—гҒҰзөҗжһңгӮ’жӨңиЁјгҒ—гҖҒеҸӮеҠ иҖ…гҒ«гғўгғӢгӮҝгғјдёҠгҒ§зҙ№д»ӢгҒ„гҒҹгҒ—гҒҫгҒ—гҒҹгҖӮ
еҸӮеҠ иҖ…гӮүгҒҜзҡҶгҖҒгғўгғӢгӮҝгғјз”»йқўгҒ«зҶұеҝғгҒ«иҰӢе…ҘгӮҠгҖҒгғЎгғўгӮ’еҸ–гӮӢгҒӘгҒ©гҖҒй–ўеҝғгҒ®й«ҳгҒ•гҒҢгҒҶгҒӢгҒҢгӮҸгӮҢгҒҫгҒ—гҒҹгҖӮ

иӘ¬жҳҺгҒ«иҒһгҒҚе…ҘгӮӢ105дәәгҒ®еҸӮеҠ иҖ…гҖӮдјҡе ҙгҒҜзҶұж°—гҒ«еҢ…гҒҫгӮҢгҒҰгҒ„гҒҫгҒ—гҒҹ
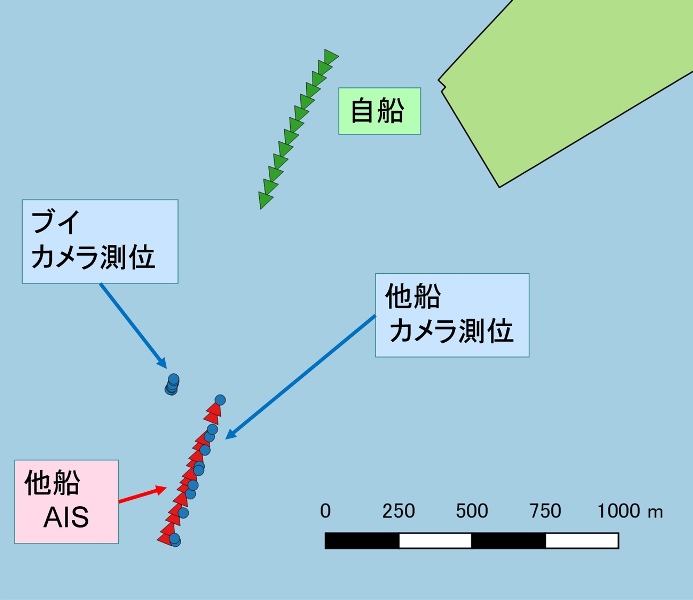
иҲ№дҪҚжҺЁе®ҡдҫӢ
пјҲв–јпјҡиҮӘиҲ№гғ»в–Іпјҡд»–иҲ№AISгғ»в—Ҹпјҡд»–иҲ№гғ»гғ–гӮӨжҺЁе®ҡдҪҚзҪ®пјү

иҲ№еҪұжӨңеҮәпјҲдёҠпјҡе·ҰгӮ«гғЎгғ©гҖҒдёӢпјҡеҸігӮ«гғЎгғ©пјү

еӨҡгҒҸгҒ®еҸӮеҠ иҖ…гҒ«еҗ‘гҒ‘гҒҰ
и©ізҙ°гҒ«иӘ¬жҳҺгҒҷгӮӢе°Ҹжһ—дё»д»»з ”з©¶е“Ў

е…¬й–Ӣе®ҹйЁ“гҒ§иӘ¬жҳҺгҒ—гҒҹе°Ҹжһ—дё»д»»з ”з©¶е“ЎпјҲеҸіпјү
еҸёдјҡгӮ’еӢҷгӮҒгҒҹй–“еі¶зі»й•·пјҲе·Ұпјү