お知らせ
NEWS
「人にやさしい499GT貨物船に関する模型実験」を公開(結果報告)
人にやさしい内航貨物船の研究開発を紹介
海上技術安全研究所では、内航船員の労働負荷低減を図る自動化技術の研究開発の一環として、各種技術を評価するために499総トン型貨物船の試験模型を開発しました。公開実験では、船の離着岸を容易にする操船支援システムを紹介。実験ではジョイスティックで船首と船尾に搭載したスラスター(横方向への動きを補助する推進装置)を操作し、船を前後進、横移動、旋回などさせました。模型船はジョイスティックの操縦かんを傾ける方向に船を進ませる仕組みになっており、前後への推進のほか、横へ倒せばスラスターが稼働し左右へ移動、ひねればその場で旋回する稼働を実演しました。これらは操作性を高めて、離着岸時における船員の負担軽減を図る狙いであることを説明しました。

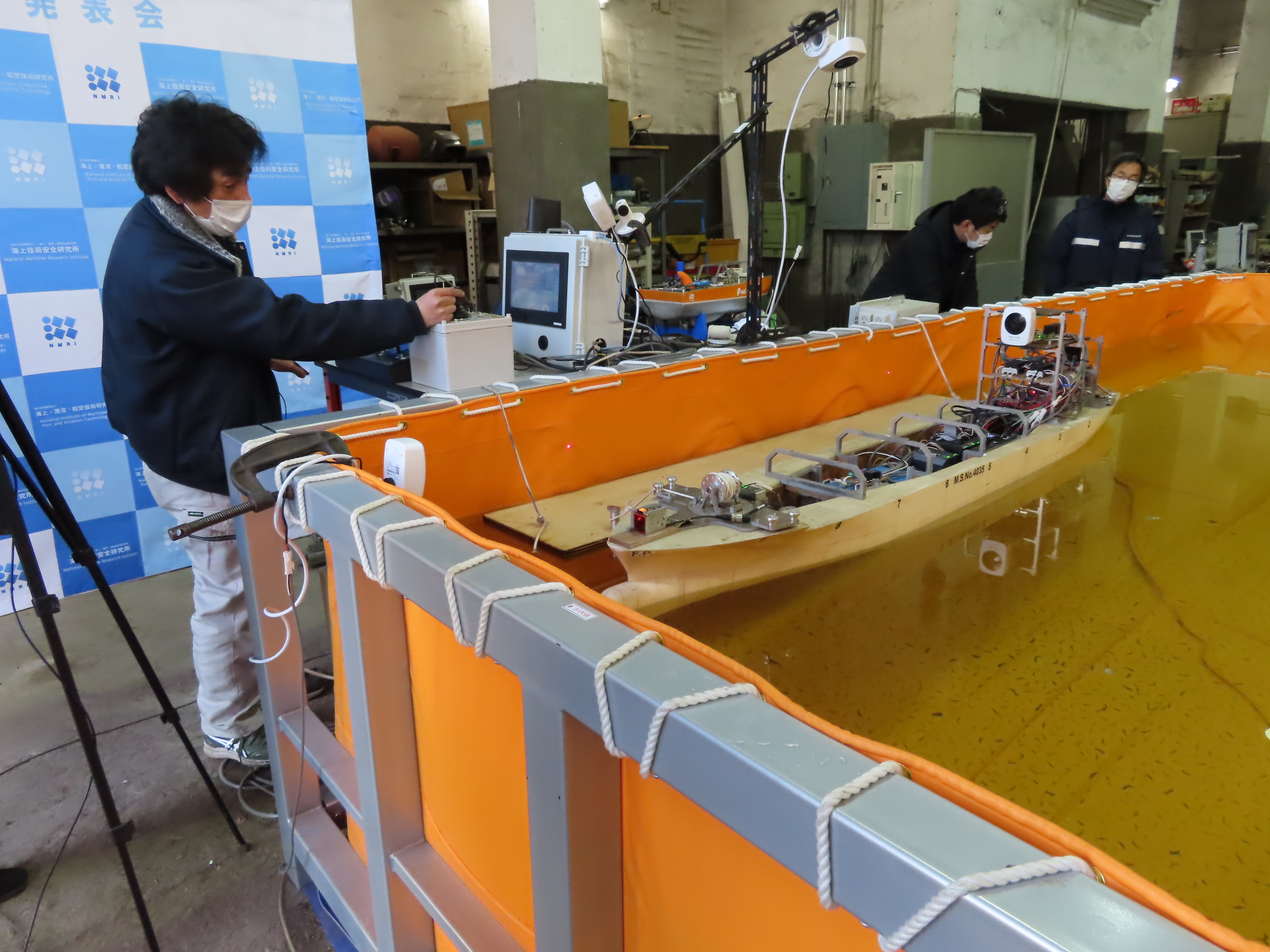
実験に使用した模型船
今後は実船への搭載や遠隔操船も視野に
模型船では、船首(前方・右舷)と船尾(右舷)にレーザー距離センサーを搭載し、船体位置や船速、回転角度などを計測し、監視スクリーンに自船の位置と動きが表示出来ます。岸壁までの距離が視覚的にリアルタイム表示されることで、より安全な操船を支援することが可能になります。
平田PT長によると、今後は強風などの状態も想定し「操作性に優れたジョイスティック操船システムの開発を目指す」と説明。船体の位置計測は、距離測定などのセンシング技術や支援方法など「実船への搭載に向け、より詳細に検討する」と、現場導入を見据え意気込みを語りました。
これらの技術を応用し、実船での自動離着桟の研究も進められています。周囲を監視するカメラシステムも整備して、「研究所がある東京・三鷹市から広島・因島にある船を遠隔操船する実証実験も予定している」と報告しました。質疑応答では操船支援技術に関して多くの質問があり、船の離着桟技術への関心の高さが伺えました。
ジョイスティックで船首と船尾に搭載したスラスター(横方向への動きを補助する推進装置)を操作