プレスリリース
PRESS RELEASES
革新的深海資源調査技術
国立研究開発法人海洋研究開発機構
国立研究開発法人 海上・港湾・航空技術研究所
海上技術安全研究所
複数の自律型海中ロボットの隊列制御による
高効率な海底調査技術の実証試験について
1. 発表のポイント
◆内閣府・戦略的イノベーション創造プログラム(以下「SIP」という。※1)で開発したマルチユーザー音響通信測位装置(※2)を実装した、複数異機種の自律型海中ロボット(自律型無人探査機:以下「AUV」という。※3)を海中に展開して、洋上中継機(以下「ASV」という。※4)を介した隊列制御(※5)を行うことで、これまでの約4倍の効率で高精度な海底調査が出来ることを実海域試験により実証した。◆複数異機種の自律型海中ロボットを同時展開できる技術は、海洋鉱物資源調査ばかりでなく、海底パイプラインや洋上風力発電等における海底・海中構造物の地盤調査や機器のメンテナンスなど、更に海洋保護区の海中モニタリングや海洋の総合安全保障の分野等への活用ができ、本試験の成果を基に2023年がAUVの隊列制御実用化に向けた飛躍の年となることが期待される。
※1 内閣府戦略的イノベーション創造プログラム(SIP):
内閣府総合科学技術・イノベーション会議(CSTI)が自らの司令塔機能を発揮して、府省の枠や旧来の分野の枠を超えたマネジメントに主導的な役割を果たすことを通じて、科学技術イノベーションを実現するために新たに創設したプログラム。
https://www8.cao.go.jp/cstp/gaiyo/sip/
※2マルチユーザー音響通信測位装置:
水中での音波による通信や測位において発生する海面や海底での反射波やドップラーシフトの影響などに対して、位相共役(時間反転)波を使用した信号処理により、複数のAUVに搭載した送波器からの信号を分離して複数のターゲットとの通信や測位を実現する技術。
※3 自律型無人探査機(AUV:Autonomous Underwater Vehicle):
人が直接行くことのできない海中を探査するために使用する海中ロボットの一種で、ケーブルを介して人が操縦する遠隔操縦ロボット(ROV: Remotely Operated Vehicle)と比べて、ケーブルによる行動範囲の制限がなく、海流などの影響を受けずに安定した観測ができる利点がある。またROVに比べて必要な支援設備が少なく運用コストが小さい。
※4洋上中継機(ASV:Autonomous Surface Vehicle):
海中の AUV の測位や通信を行うために、音響測位および通信装置を備えた無人自動運航の海上艇。海面からの影響を避けるために海面からの距離を離した位置に音響装置を搭載しており、また、AUV からの情報を支援船舶または陸上へ送信するための衛星通信装置等を備えている。
※5 隊列制御:
水面上のASVを用いて、複数のAUVを一定範囲に留め集中的に制御する方式
2.概要
調査船舶を用いた海底調査を補完する技術として、これまでAUVを用いることで、海底微細地形の把握などにおいて船舶からの調査などでは得ることが難しい高い精度のデータを高効率で得ることができるようになってきました。SIP革新的深海資源調査技術(プログラムディレクター 石井正一、以下「SIP海洋」という。※6)では、南鳥島沖約6,000mの深海に存在するレアアース泥の調査のために必要となる要素技術開発の一つとして、複数のAUVを同時に制御することが可能な隊列制御技術の開発に取り組みました。複数のAUVの同時展開には、AUVの管制に洋上中継機(以下「ASV」という。)を組み合わせ、船舶に代わりASVがAUVを追跡する運用方式を用いています。
2022年9月に駿河湾水深1,400m海域で実施した海域試験では、1機のASVを介して、性能と製造メーカの異なる異機種4機のAUVでの海底地形調査を実施し、結果として1mメッシュ程度の分解能で海底地形の詳細情報を高効率に得ることができました。また、実海域環境における海流などの外乱で特性の異なる異機種のAUVに生じる計画測線からの誤差に対しても良好な制御を保ち、複数のAUVを同時に制御できたことにより、今回開発した隊列制御が制御技術として優れていることを示すことができました。
※6 革新的深海資源調査技術:
SIP第2期(2018-2022年度)にて選定された海洋課題。世界に先駆けて深海に賦存するレアアース泥等の海洋鉱物資源に関する革新的深海資源調査技術を段階的に確立・実証し、社会実装を進めて将来を見据えた産業化モデル構築に道筋をつけることを目指す。
3.背景
海洋鉱物資源の調査などの広範囲の海洋調査には、従来、調査船舶により船舶から発信する音波を用いた調査が行われてきましたが、水深の深い海域では広い範囲の海底地形データ等が得られる反面、取得データの精度の低下傾向にあり、高精度の海底地形調査には限界がありました。これに対して、海中で展開するAUVを用いる調査では、海底面近くの高度で航行しながら、AUVから音波を発して調査を行うことにより、海面上の船舶からの調査と比較して、極めて高い精度のデータを得ることが可能であり、例えば、墜落したマレーシア航空370便の海中捜索にはAUVによる調査が利用されていたことが知られています。
SIP海洋では、南鳥島沖の約6,000mの深海に存在するレアアース泥の調査を目的に、効率的な運用に関する要素技術開発として、複数のAUVを同時に調査航海に展開することを可能にする隊列制御の技術開発に取り組みました。
SIP海洋で開発した音響通信測位装置は、1対多のマルチユーザー音響通信測位を可能とする特長があり、ASVを介して複数のAUVを管制するのに有効な技術です。開発した音響通信測位装置を複数異機種のAUVに搭載することで、特性の異なるAUVの管制を可能とします。これまで効率的なAUVの運用を目的とした同一機種での複数機運用は世界で試みられてきましたが、SIP海洋における異機種複数機の運用技術は、観測に投入するAUVの選択肢を拡げ、例えば同一海域における観測センサーや航行高度の異なる観測を同時に実施する運用をも可能とする世界で初めての試みです。
4.成果
AUVの隊列制御による高効率調査の実証試験航海は、令和4年9月1日~14日の期間に駿河湾の設定海域(図1)にて実施し、AUVの母船として東洋建設が所有する「AUGUST EXPLORER」を使用しました。試験に使用するAUVには、国立研究開発法人海上・港湾・航空技術研究所海上技術安全研究所のNMRI航行型AUV2号機、3号機、4号機、および株式会社IHIのAU3のAUV4機(図2)を用いました。AUVの管制にはASV「KaiKoo」(図3)を使用して試験を行いました。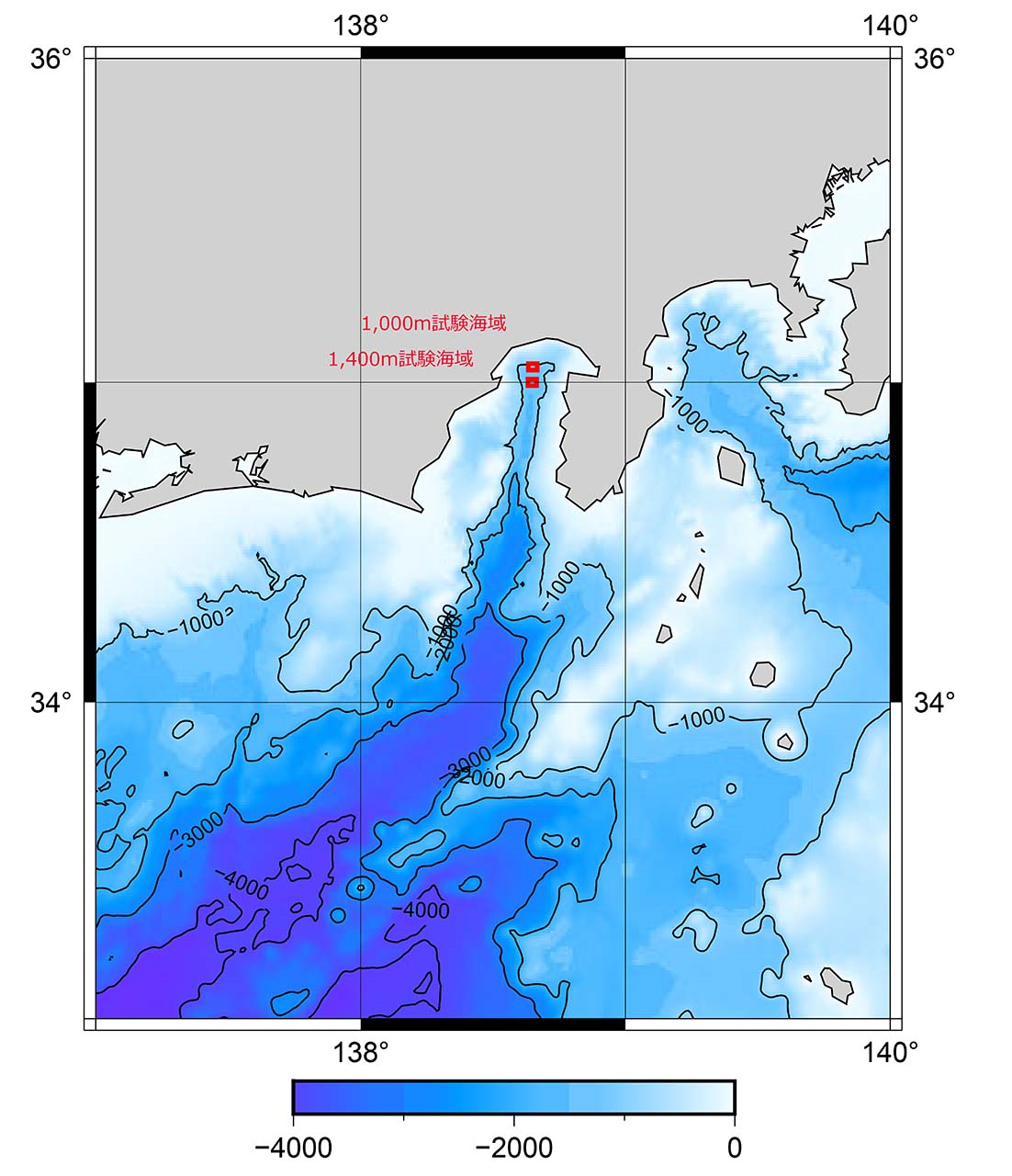
図1. 試験海域(駿河湾1,000m及び1,400m海域)

図2. 隊列制御を行った4機のAUV

図3.ASV「KaiKoo」
海域試験は水深1,000m及び1,400m海域において、測線間の距離を2種類とした4条件で実施しました。4機のAUVそれぞれに東西方向を往復する潜航航路(図4上図)を設定し、AUVにより観測された海底地形データを処理することにより、1mメッシュ程度の極めて高精細な海底地形(図4下図、水深1,400m)の把握に成功しました。
また、SIP海洋の目標である10機での隊列については、利用可能な10機の実機が存在しないため、今回の異機種4機での試験結果をもとにシミュレータを用いて10機のAUVの隊列制御技術により海底地形図の取得ができることの確認を行い、将来のAUV10機の隊列制御について技術的な目途を立てることができました。
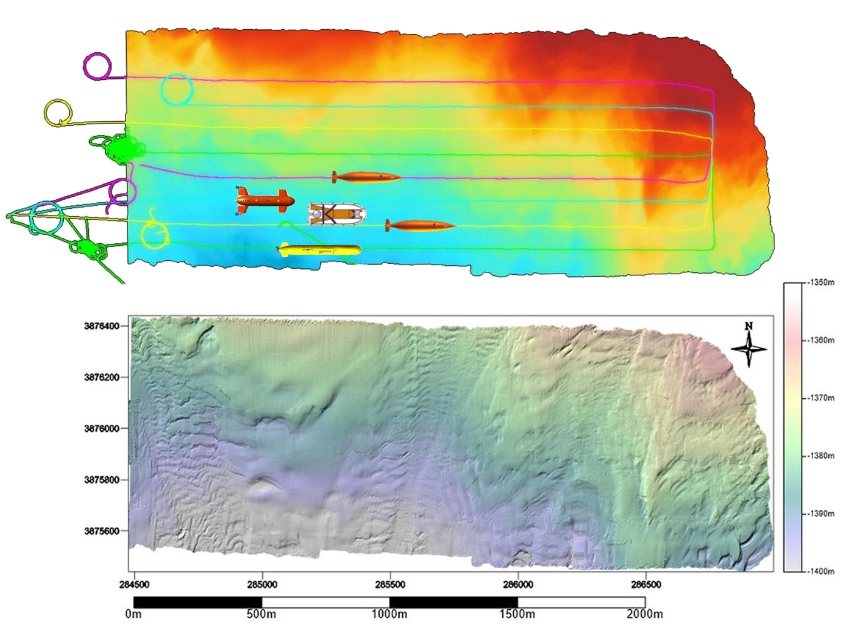
図4. 異機種4機のAUVの潜航航路図と得られた海底地形
5.今後の展望
ASVと併せた効率的なAUVの運用技術の開発により、今後、AUVの活用は益々拡がることが期待されます。特に異機種複数機の運用技術は、観測に投入するAUVの選択肢を拡げ、例えば同一海域における観測センサーや航行高度の異なる観測を同時に実施する運用をも可能とするものです。今回の成果は、SIP海洋が目的としてきた海洋鉱物資源調査に限らず、海底パイプラインや洋上風力発電等における海底・海中構造物の調査、更には海洋保護区のモニタリングや海洋の安全保障の分野への活用が期待されます。
また、ASVを介してAUVを制御する技術開発が実証できたことで、今後の技術開発の目標としては複数のAUV間で通信・測位制御を行う技術開発を行い、将来的にASVとAUV、またはAUV同士の協調群制御(※7)が可能とする技術の構築を目指します。
※7 協調群制御:
隊列制御がASVを用いて各AUVを管制する集中的な制御方式であるのに対して、協調群制御ではAUV間の通信・測位により複数のAUVが連携し、自律的に行動する制御方式である。洋上からの集中管制機能ではなく、水中におけるAUV同士の通信・測位により,洋上からの制御に依存しないで効率的で高精度な調査を実現することが期待される複数AUVの制御方法。
本実証試験に関する資料映像は、以下のURLからご覧いただけます。
https://youtu.be/f4NQ_tvskd0
お問い合わせ先
(本研究について)
国立研究開発法人海洋研究開発機構
深海資源調査技術開発プロジェクトチーム 大澤 弘敬
電話:046-867-9244
E-mail:osawah@jamstec.go.jp
(報道担当)
国立研究開発法人海洋研究開発機構
海洋科学技術戦略部 報道室
電話:045-778-5690
E-mail:press@jamstec.go.jp
国立研究開発法人 海上・港湾・航空技術研究所
海上技術安全研究所 企画部広報係
Tel:0422-41-3005
E-mail:info2@m.mpat.go.jp
URL:https://www.nmri.go.jp/
リリース文はこちら
![]() プレスリリース
プレスリリース