ж·ұжө·гғўгғӢгӮҝгғјз”ЁгғӯгғңгғғгғҲгӮ·гӮ№гғҶгғ гҒ®жҠҖиЎ“й–Ӣзҷә (1999-2002)
(2002е№ҙ6жңҲжө·дёҠжҠҖиЎ“е®үе…Ёз ”з©¶жүҖз ”з©¶зҷәиЎЁдјҡгӮҲгӮҠ)
пјҲйҒӢеӢ•жҖ§иғҪз ”з©¶гӮ°гғ«гғјгғ—пјү
RESEARCH OVERVIEW
ж·ұжө·гғўгғӢгӮҝгғјз”Ёе°ҸеһӢгғӯгғңгғғгғҲгӮ·гӮ№гғҶгғ гҒ®жҠҖиЎ“й–ӢзҷәгҒ«гҒӨгҒ„гҒҰ
(2002е№ҙ6жңҲжө·дёҠжҠҖиЎ“е®үе…Ёз ”з©¶жүҖз ”з©¶зҷәиЎЁдјҡгӮҲгӮҠпјү
| ж“ҚзёҰгғ»еҲ¶еҫЎз ”究гӮ°гғ«гғјгғ— | дёҠйҮҺйҒ“йӣ„, дәҢжқ‘гҖҖжӯЈ |
| ж·ұжө·жҠҖиЎ“з ”з©¶гӮ°гғ«гғјгғ— | е®үи—ӨиЈ•еҸӢ, еӨ§е·қгҖҖиұҠ |
| жқұдә¬еӨ§еӯҰз”ҹз”ЈжҠҖиЎ“з ”з©¶жүҖ | жөҰгҖҖз’°, жө…е·қиіўдёҖ, и—Өдә•ијқеӨ« |
| (ж Ә)KDDIз ”з©¶жүҖ | е°Ҹеі¶ж·ідёҖ |
| (ж Ә)жө·жҙӢе·ҘеӯҰз ”з©¶жүҖ | дјҠи—ӨгҖҖиӯІ |
иҰҒж—Ё
-
гҒҜгҒҳгӮҒгҒ«
гҖҖжң¬з ”究гҒҜгҖҒ
 жқұдә¬еӨ§еӯҰз”ҹз”ЈжҠҖиЎ“з ”з©¶жүҖжө·дёӯе·ҘеӯҰз ”з©¶гӮ»гғігӮҝгғј
гҒЁгҒ®е…ұеҗҢз ”з©¶гӮ’йҖҡгҒҳгҒҰгҖҒзҙўгҒҢдҪңжҘӯгҒ®ж”ҜйҡңгҒЁгҒӘгӮүгҒӘгҒ„з„Ўдәәз„ЎзҙўжҪңж°ҙиүҮ(AUV)гҒЁж“ҚдҪңгҒҷгӮӢдәәй–“гҒҢгҒқгҒ®е ҙгҒ§зҠ¶жіҒгӮ’еҲӨж–ӯгҒ—гҒҰеҝ…иҰҒгҒӘиЎҢеӢ•гӮ’гҒҠгҒ“гҒӘгҒҲгӮӢз„ЎдәәжңүзҙўжҪңж°ҙиүҮ(ROV)гҒ®зү№й•·гӮ’е…јгҒӯеӮҷгҒҲгҒҹж·ұжө·гғўгғӢгӮҝгғјз”Ёе°ҸеһӢгғӯгғңгғғгғҲгӮ·гӮ№гғҶгғ гҒ®й–ӢзҷәгӮ’зӣ®зҡ„гҒЁгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
жқұдә¬еӨ§еӯҰз”ҹз”ЈжҠҖиЎ“з ”з©¶жүҖжө·дёӯе·ҘеӯҰз ”з©¶гӮ»гғігӮҝгғј
гҒЁгҒ®е…ұеҗҢз ”з©¶гӮ’йҖҡгҒҳгҒҰгҖҒзҙўгҒҢдҪңжҘӯгҒ®ж”ҜйҡңгҒЁгҒӘгӮүгҒӘгҒ„з„Ўдәәз„ЎзҙўжҪңж°ҙиүҮ(AUV)гҒЁж“ҚдҪңгҒҷгӮӢдәәй–“гҒҢгҒқгҒ®е ҙгҒ§зҠ¶жіҒгӮ’еҲӨж–ӯгҒ—гҒҰеҝ…иҰҒгҒӘиЎҢеӢ•гӮ’гҒҠгҒ“гҒӘгҒҲгӮӢз„ЎдәәжңүзҙўжҪңж°ҙиүҮ(ROV)гҒ®зү№й•·гӮ’е…јгҒӯеӮҷгҒҲгҒҹж·ұжө·гғўгғӢгӮҝгғјз”Ёе°ҸеһӢгғӯгғңгғғгғҲгӮ·гӮ№гғҶгғ гҒ®й–ӢзҷәгӮ’зӣ®зҡ„гҒЁгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
-
гӮ·гӮ№гғҶгғ гҒ®жҰӮеҝөиЁӯиЁҲгҒЁиҰҒзҙ жҠҖиЎ“
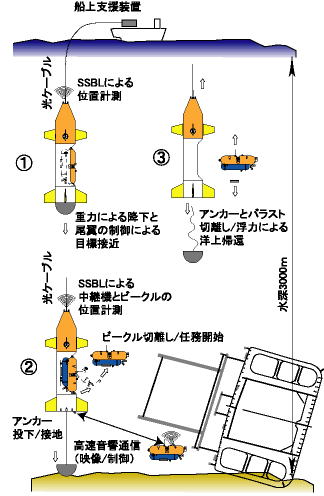
гҖҖгғӯгғңгғғгғҲгӮ·гӮ№гғҶгғ гҒ®йҒӢз”ЁеҪўж…ӢгҒҜеӣі-1гҒ®гҒЁгҒҠгӮҠгҒ§гҒҷгҖӮ
еӣі-1гӮ·гӮ№гғҶгғ йҒӢз”ЁжҰӮеҝөеӣі
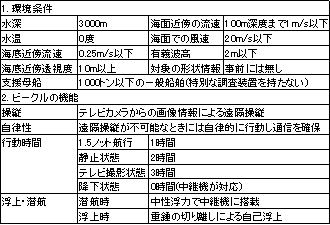
гҖҖз’°еўғжқЎд»¶гҒҜиЎЁ-1гҒ®гҒЁгҒҠгӮҠгҒ§гҒҷгҖӮ
иЎЁ-1 з’°еўғжқЎд»¶гҒЁгғ“гғјгӮҜгғ«гҒ®ж©ҹиғҪ
гҖҖеҝ…иҰҒгҒӘиҰҒзҙ жҠҖиЎ“гҒ®й–ӢзҷәзҠ¶жіҒгҒҜж¬ЎгҒ®йҖҡгӮҠгҒ§гҒҷгҖӮ
-
й«ҳйҖҹйҹійҹҝйҖҡдҝЎиЈ…зҪ®гҒ®й–Ӣзҷә
гҖҖзҸҫзҠ¶гҒ§дё–з•ҢжңҖй«ҳйҖҹгҒ®128kbit/sгҒ®йҹійҹҝйҖҡдҝЎиЈ…зҪ®гӮ’й–ӢзҷәгҒ—гҒҫгҒ—гҒҹ(еӣі-2)гҖӮйҖҡдҝЎе‘Ёжіўж•°гҒҜ100kHzеёҜгҖҒжҢҮеҗ‘зү№жҖ§гҒҜВұ30еәҰгҖҒдјқйҖҒи·қйӣўгҒҜ500mд»ҘдёҠгҒ§гҒҷгҖӮ
еӣі-2й«ҳйҖҹйҹійҹҝйҖҡдҝЎиЈ…зҪ®

-
гғ“гғјгӮҜгғ«гҒ®йҒ йҡ”ж“ҚзёҰж©ҹиғҪгҒЁиҮӘеҫӢж©ҹиғҪ
гҖҖиҮӘеҫӢж©ҹиғҪгҒЁжғ…е ұдјқйҒ”гҒ®жҷӮй–“йҒ…гӮҢгҒ«еҜҫеҮҰгҒҷгӮӢгҒҹгӮҒгҒ«з”»еғҸгғ•гӮЈгғ«гӮҝгҒЁгғҶгғігғ—гғ¬гғјгғҲгғһгғғгғҒгғігӮ°гҒ®жүӢжі•гӮ’з”ЁгҒ„гҒҹгӮ·гӮ№гғҶгғ гӮ’й–ӢзҷәдёӯгҒ§гҒҷгҖӮ
-
дёӯз¶ҷж©ҹгҒ®йҷҚдёӢзү№жҖ§
гҖҖжө·еә•гҒ«йҷҚдёӢгҒҷгӮӢйҡӣгҒ®жҢҷеӢ•гӮ’жҳҺгӮүгҒӢгҒ«гҒҷгӮӢгҒҹгӮҒгҒ«гҖҒжөҒдҪ“еҠӣиЁҲжё¬гғҮгғјгӮҝгӮ’гӮӮгҒЁгҒ«гҒ—гҒҹйҷҚдёӢзҠ¶ж…ӢгҒ®жҺЁе®ҡгҒЁж·ұжө·еҹҹеҶҚзҸҫж°ҙж§ҪгҒ§гҒ®иҮӘз”ұйҷҚдёӢжЁЎеһӢе®ҹйЁ“(еӣі-3еҸӮз…§)гӮ’иЁҲз”»гҒ—гҒҰгҒ„гҒҫгҒҷгҖӮгҒ“гҒ®жөҒе ҙиЁҲжё¬е®ҹйЁ“гҒҜжө·жҙӢж§ӢйҖ зү©и©ҰйЁ“ж°ҙж§ҪгҒ§е®ҹж–ҪгҒ—гҒҫгҒ—гҒҹгҖӮжЁЎеһӢиҲ№гҒҜXYеҸ°и»ҠгҒ«гӮҲгҒЈгҒҰж–ңиҲӘгӮ„ж—ӢеӣһгҒ®ж“ҚзёҰйҒӢеӢ•зҠ¶ж…ӢгҒ«жӣіиҲӘгҒ•гӮҢгҒҫгҒҷгҖӮ
еӣі-3 дёӯз¶ҷж©ҹйҷҚдёӢжЁЎеһӢ

-
и»ҪйҮҸе°ҸеһӢгӮ·гӮ№гғҶгғ гҒ®зөұеҗҲеҢ–
гҖҖең§еҠӣе®№еҷЁзӯүгӮ’жө…жө·еҹҹеҜҫеҝңд»•ж§ҳгҒ«ж”№гӮҒгҒҹгғ—гғӯгғҲгӮҝгӮӨгғ—гӮ’иЈҪдҪң(еӣі-4еҸӮз…§)гҒҷгӮӢгҒ“гҒЁгҒ«гӮҲгҒЈгҒҰгҖҒжң¬гғӯгғңгғғгғҲгӮ·гӮ№гғҶгғ гҒҢи»ҪйҮҸе°ҸеһӢгҒ®гӮ·гӮ№гғҶгғ гҒЁгҒ—гҒҰе®ҹзҸҫеҸҜиғҪгҒ§гҒӮгӮӢгҒ“гҒЁгӮ’е®ҹиЁјгҒ—гҒҫгҒ—гҒҹгҖӮ
еӣі-4 иЈҪдҪңдёӯгҒ®гғ“гғјгӮҜгғ«гҒ®гғ—гғӯгғҲгӮҝгӮӨгғ—

-
-
гҒҠгӮҸгӮҠгҒ«
гҖҖжң¬з ”究иЁҲз”»гҒ®жңҖзөӮе№ҙеәҰгҒ§гҒӮгӮӢ2002е№ҙеәҰгҒ«гҒҜгғ—гғӯгғҲгӮҝгӮӨгғ—гӮ’з”ЁгҒ„гҒҹз·ҸеҗҲи©ҰйЁ“гӮ’иЁҲз”»гҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ