ж“ҚзёҰжҖ§иғҪгҒ«дҝӮгӮҸгӮӢе®үе…Ёеҹәжә–гҒҠгӮҲгҒіжҺЁе®ҡжүӢжі•й«ҳеәҰеҢ–гҒ«й–ўгҒҷгӮӢз ”з©¶
(2002е№ҙ6жңҲжө·дёҠжҠҖиЎ“е®үе…Ёз ”з©¶жүҖз ”з©¶зҷәиЎЁдјҡгӮҲгӮҠ)
пјҲйҒӢеӢ•жҖ§иғҪз ”з©¶гӮ°гғ«гғјгғ—пјү
RESEARCH OVERVIEW
ж·ұжө·гғўгғӢгӮҝгғјз”Ёе°ҸеһӢгғӯгғңгғғгғҲгӮ·гӮ№гғҶгғ гҒ®жҠҖиЎ“й–ӢзҷәгҒ«гҒӨгҒ„гҒҰ
(2002е№ҙ6жңҲжө·дёҠжҠҖиЎ“е®үе…Ёз ”з©¶жүҖз ”з©¶зҷәиЎЁдјҡгӮҲгӮҠпјү
| жө·дёҠе®үе…Ёз ”з©¶й ҳеҹҹгҖҖж“ҚзёҰгғ»еҲ¶еҫЎз ”究гӮ°гғ«гғјгғ— | дәҢжқ‘гҖҖжӯЈ*гҖҒдёҠйҮҺйҒ“йӣ„ |
| иҖҗиҲӘгғ»еҫ©еҺҹжҖ§иғҪз ”з©¶гӮ°гғ«гғјгғ— | з”°еҸЈжҷҙйӮҰгҖҒжІўз”°еҚҡеҸІ |
иҰҒж—Ё
-
гҒҫгҒҲгҒҢгҒҚ
гҖҖпјҳпјҗпҪҚи§’ж°ҙж§ҪгҒ§гҒҜгҖҒпј§пј°пјігӮ’з”ЁгҒ„гҒҹиҮӘз”ұиҲӘиө°жЁЎеһӢиҲ№гҒ®дҪҚзҪ®иЁҲжё¬гӮ·гӮ№гғҶгғ гӮ’ж–°гҒҹгҒ«ж•ҙеӮҷгҒ—гҒҹгҖӮгҒ“гҒ®дҪҚзҪ®иЁҲжё¬гӮ·гӮ№гғҶгғ гҒ®ж§ӢжҲҗгӮ„иЁҲжё¬зІҫеәҰгҒ«гҒӨгҒ„гҒҰзҙ№д»ӢгҒҷгӮӢгҖӮ
-
пј§пј°пјідҪҚзҪ®иЁҲжё¬гӮ·гӮ№гғҶгғ гҒ®ж§ӢжҲҗгҒЁиЁҲжё¬дҫӢгҒ®зҙ№д»Ӣ
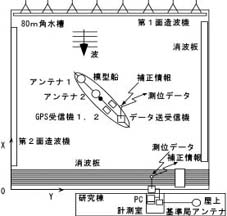
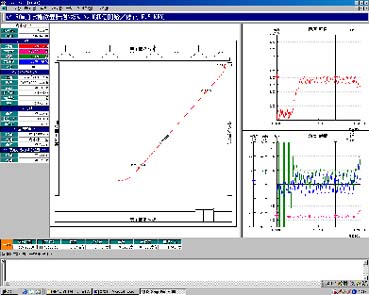
гҖҖпј§пј°пјідҪҚзҪ®иЁҲжё¬гӮ·гӮ№гғҶгғ гҒҜгҖҒеӣіпјҚпј‘гҒ«зӨәгҒҷгӮҲгҒҶгҒ«иЁҲпј“еҸ°гҒ®пј§пј°пјіеҸ—дҝЎж©ҹгҒЁгҖҒгғҮгғјгӮҝйҖҒеҸ—дҝЎж©ҹгҖҒгғҮгғјгӮҝеҮҰзҗҶз”Ёпј°пјЈгҒ§ж§ӢжҲҗгҒ•гӮҢгҖҒжЁЎеһӢиҲ№дёҠгҒ®пј’еҸ°гҒ®гӮўгғігғҶгғҠдҪҚзҪ®гҒҢгҖҒпј•Hzй–“йҡ”гҒ§й«ҳзІҫеәҰгҒ§иЁҲжё¬гҒ§гҒҚгӮӢгҖӮиЁҲжё¬гҒ•гӮҢгҒҹжЁЎеһӢиҲ№дёҠпј’зӮ№гҒ®жё¬дҪҚгғҮгғјгӮҝгҒҜйҷёдёҠгҒ«з„Ўз·ҡгҒ§йҖҒдҝЎгҒ•гӮҢгҖҒиЁҲжё¬е®ӨгҒ®пј°пјЈгҒ§жЁЎеһӢиҲ№гҒ®йҮҚеҝғдҪҚзҪ®гҖҒйҖҹеәҰгҖҒйҖІиЎҢж–№еҗ‘и§’гҖҒж–№дҪҚи§’зӯүгӮ’жҷӮгҖ…еҲ»гҖ…иЁҲз®—гҒ—иЎЁзӨәгҒҷгӮӢгҖӮеӣіпјҚпј’пҪһпј”гҒ«иҲ№й•·4.5пҪҚгҖҒй«ҳйҖҹгӮ«гғјгғ•гӮ§гғӘгғјжЁЎеһӢгҒ®жіўжөӘдёӯи©ҰйЁ“гҒ®дёҖдҫӢгӮ’зӨәгҒҷгҖӮ
еӣіпјҚпј‘гҖҖпј§пј°пјіж©ҹеҷЁй…ҚзҪ®
еӣіпјҚпј’гҖҖжЁЎеһӢиҲ№дёҠгҒ®й…ҚзҪ®

еӣіпјҚпј“гҖҖжіўжөӘдёӯеҗ‘жіўе®ҹйЁ“зҠ¶ж…Ӣ

еӣіпјҚпј”гҖҖж–ңгӮҒиҝҪгҒ„жіўзҠ¶ж…ӢгҒ®иЁҲжё¬дҫӢпјҲпј°пјЈз”»йқўпјү
-
дҪҚзҪ®иЁҲжё¬зІҫеәҰ
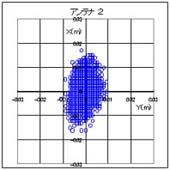
гҖҖпј§пј°пјіиЈ…зҪ®гӮ’йҷёдёҠгҒ«еӣәе®ҡгҒ—гҖҒдҪҚзҪ®иЁҲжё¬гӮ’иЎҢгҒЈгҒҹзөҗжһңгӮ’еӣіпјҚпј•гҒ«зӨәгҒҷгҖӮдҪҚзҪ®иЁҲжё¬зІҫеәҰгҒҜВұ20mmд»ҘеҶ…пјҲпј’д№—е№іеқҮе№іж–№еҖӨпјқ6.2mmпјүгҒ§гҒӮгӮҠгҖҒжЁЎеһӢиҲ№гҒ®иҲӘи·ЎгҖҒйҖҹеәҰзӯүгӮ’жұӮгӮҒгӮӢгҒҹгӮҒгҒ«гҒҜеҚҒеҲҶгҒӘзІҫеәҰгӮ’жңүгҒ—гҒҰгҒ„гӮӢгҒЁиЁҖгҒҲгӮӢгҖӮ
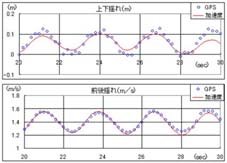
гҖҖпј§пј°пјігҒ«гӮҲгӮҠжіўе‘ЁжңҹгҒ®иҲ№дҪ“йҒӢеӢ•гӮ’иЁҲжё¬гҒҷгӮӢеҸҜиғҪжҖ§гҒ«гҒӨгҒ„гҒҰжӨңиЁҺгҒ—гҒҹзөҗжһңгӮ’еӣіпјҚпј–гҒ«зӨәгҒҷгҖӮзІҫеәҰзҡ„гҒ«гҒҜеҚҒеҲҶгҒ§гҒҜгҒӘгҒ„гӮӮгҒ®гҒ®еҮәдјҡжіўе‘ЁжңҹгҒҢй•·гҒ‘гӮҢгҒ°дёҠдёӢжҸәгӮҢгӮ„еүҚеҫҢжҸәгӮҢзӯүгҒ®иҲ№дҪ“йҒӢеӢ•иЁҲжё¬гҒ«еҜҫгҒ—гҒҰгӮӮжңүеҠ№гҒӘжүӢж®өгҒ§гҒӮгӮӢгҒЁиЁҖгҒҲгӮӢгҖӮеӣіпјҚпј•гҖҖеӣәе®ҡзӮ№гҒ§гҒ®дҪҚзҪ®иЁҲжё¬зІҫеәҰ
еӣіпјҚпј–гҖҖпј§пј°пјігҒ«гӮҲгӮӢжіўе‘ЁжңҹйҒӢеӢ•гҒ®иЁҲжё¬зөҗжһң
-
гҒҫгҒЁгӮҒ
гҖҖпјҳпјҗпҪҚи§’ж°ҙж§ҪгҒ«ж–°гҒҹгҒ«ж•ҙеӮҷгҒ—гҒҹпј§пј°пјіжЁЎеһӢиҲ№дҪҚзҪ®иЁҲжё¬гӮ·гӮ№гғҶгғ гҒ®зҙ№д»ӢгӮ’иЎҢгҒЈгҒҹгҖӮжң¬гӮ·гӮ№гғҶгғ гҒ§гҒҜгҖҒжіўжөӘдёӯгҒ§гҒ®иҲ№дҪ“йҒӢеӢ•гӮ’дјҙгҒҶзҠ¶жіҒгҒ«гҒҠгҒ„гҒҰгӮӮжЁЎеһӢиҲ№гҒ®иҲӘи·ЎгӮ„йҖҹеәҰгҒҢж”ҜйҡңгҒӘгҒҸиЁҲжё¬гҒ§гҒҚгҖҒгҒқгҒ®дҪҚзҪ®иЁҲжё¬зІҫеәҰгҒҜВұ20mmд»ҘеҶ…пјҲпј’д№—е№іеқҮе№іж–№еҖӨпјқ6.2mmпјүгҒ§гҒӮгӮӢгҒ“гҒЁгӮ’зӨәгҒ—гҒҹгҖӮгҒҫгҒҹгҖҒпј§пј°пјігҒ«гӮҲгӮӢиҲ№дҪ“йҒӢеӢ•иЁҲжё¬гҒ®еҸҜиғҪжҖ§гҒ«гҒӨгҒ„гҒҰжӨңиЁҺгҒ—гҒҹзөҗжһңгӮ’зӨәгҒ—гҒҹгҖӮ